Динамика механизмов с приводами на основе эффекта памяти формы
Диссертация
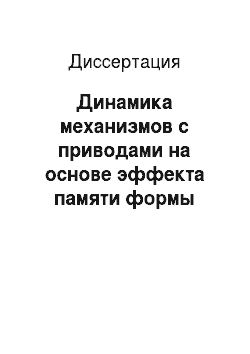
Т1п -0,012 ''?', рад. А1тап Рис. 3.3.3. Рис. 3.3.4.Рис. 3.3.5.•?, рад.Рис. 3.3.6.Зависимости 7)"-" и Т, пах ОТ 0) построены на рис. 3.3.7. Сложив все значения М, для каждого угла (р и взяв среднее арифметическое от полученных сумм, получим среднюю величину суммарного момента для данной (О. Следовательно, можно построить зависимость такого среднего момента от скорости вращения двигателя со… Читать ещё >
Содержание
- Глава 1. Основные физико-механические свойства ЭПФ-сплава
- Глава 2. Динамика многозвенных трансформируемых конструкций с проволочными ЭПФ-приводами
- 2. Л. Рычажный механизм
- 2. 2. Алгоритм расчета движения механизмов приводимых в действие сокращением проволоки с ЭПФ
- 2. 3. Динамика рычажного механизма с учетом сдвига характеристических температур превращения
- 2. 4. Расчет динамики раскрытия шарнирной ячейки параллелограмноготипа
- 2. 5. Учет влияния изменения модуля упругости сплава с ЭПФ
- 2. 6. Динамика раскрытия многозвенной фермы «Рапана «
- 2. Л. Рычажный механизм
- 3. 1. Конструкция и динамический расчет роторного мартенситного двигателя. ^
- 3. 2. Фазы движения простейшего роторного мартенситного двигателя
- 3. 3. Расчет статической характеристики роторного мартенситного двигателя
- 3. 4. Экспериментальная проверка результатов
Список литературы
- Антонюк Е.Я., Матисевич В. М. Моделирование динамических процессов в стержневых механизмах с неидеальными связями // Электронное моделирование 1996, 18 N3, с. 84−88.
- Беннигоф Дж. К. Расчет собственных частот методом итераций составляющих мод. //Аэрокосмическая техника N2 1988 г., с. 85−93.
- Бердиссо P.A., Хафтка Р. Т. Статистический анализ статистического управления формой космических конструкций. // Аэрокосмическая техника. N3, 1991 г., с.93−99.
- Гуляев В.И., Ефремов И. С. Динамика орбитальной станции с протяженной фермой. // Космические исследования.Т.32, 1994, Вып.2, с.61−70.
- Киквидзе О.Г. Уравнение состояния сплавов с эффектом памяти формы. //Проблемы машиностр. и надеж, машин. 1996, N2, с.51−55.
- Кононенко В.О. Колебательные системы с ограниченным возбуждением // М.: Наука, 1964, 245 с.
- Кравченко Ю.Д., Лихачев В. А., Разов А. И., Трусов С. Н., Чернявский А. Г. Опыт применения сплавов с ЭПФ при сооружении крупногабаритных конструкций в открытом космосе //ЖТФ. 1996. Т.66. № 11, с.153−161.
- Лихачев В.А., Разов А. И. Проблемы мартенситной энергетики// Физика прочности и пластичности. // Л.: Наука, 1986, с. 103−111.
- Материалы с эффектом памяти формы: Справ, изд. /Под ред. Лихачева В. А. Т.1. СПб.: Изд-во НИИХ СПбГУ, 1997, 424 с.
- Материалы с эффектом памяти формы: Справ, изд. /Под ред. Лихачева В. А. Т.2. СПб.: Изд-во НИИХ СПбГУ, 1998, 374 с.
- Материалы с эффектом памяти формы: Справ, изд. /Под ред. Лихачева В. А. Т.З. СПб.: Изд-во НИИХ СПбГУ, 1998, 320 с.
- Материалы с эффектом памяти формы: Справ, изд. /Под ред. Лихачева В. А. Т.4. СПб.: Изд-во НИИХ СПбГУ, 1998, 268 с.
- Миллер Д.Ф., Шим Дж. Одновременная оптимизация конструкции и управления конструкций и управления с помощью градиентных методов. // Аэрокосмическая техника. N2, 1988 г., с.94−103.
- Мовчан A.A. Аналитическое решение задач о прямом и обратном превращении для сплавов с памятью формы //Прикладная механика и техническая физика. 1996. № 4. С. 136−144.
- Разов А.И., Чернявский А. Г. Применение сплавов с ЭПФ в космической технике: прошлое и будущее// Механизмы деформации и разрушения перспективных материалов. Сборник трудов XXXV семинара «Актуальные проблемы прочности». Псков, 1999, с.254−258.
- A Beam-Like Behavior of Space Trusses. Renton J.D. AIAA Journal Vol. 22, Feb 1984, p. 273−280.
- A Computational Model of Shape Memory Alloys for the design and Control of Micro-Actuators, D. Yang, G. Lin, and R.Warrington. Micromechanical Systems. 1992, vol. 40, p. 171−181.
- A discrete model for the configuration control of hyper-redundant manipulators Zanganeh, K.E.- Lee, R.S.K.- Hughes, P.C. Robotics and Automation, 1997. Proceedings., 1997, IEEE International Conference on Volume: 1, 1997, vol.1, p. 167−172.
- A hyper-redundant manipulator Chirikjian, G.S.- Burdick, J.W. IEEE Robotics & Automation Magazine Volume: 14, Dec. 1994, p. 22−29.
- A linear SMA motor as direct-drive robotic actuator. M. Bergamasco, F. Salsedo, P. Dario /IEEE International conference on Robotics and automation, p. 618−623. 1989.
- A new actuator of a joint mechanism using TiNi alloy wire. K.Kuribayashi. The int. journalof robotics research, 4(4), 1986.
- A new method for structural topological optimization based on the concept of independent continuous variables and smooth model. Sui Yunkang, Yang Dequing. Acta mechanica sinca, v 14, N2, 1998, p. 179−185.
- A study of NiTi shape memory alloy springs and its application in a new robotic actuator Wen, M.- Tu, G.F.- Zong, Q.Y.- Xie, C.X. Industrial Technology, 1994., Proceedings of the IEEE International Conference on, 1994, p. 215−219.
- Application of shape memory alloy to robotic actuators. M. Hashimoto, Mansanori Takeda, Hirofumi Sagava. Journal of robotic systems, 2(1): 325,1985.
- Atlas anatomiae corporis humani./ Medicina konyvkiado. Budapest, 1984. 313 p.
- Attitude dynamics of the small expendable -tether deployment system./ Grassi Michele Cosmo Mavio L. // Acta Astronaut, 1995, 36, N3, p.141−148.
- Beam-shape correction in deployable phased arrays Yonezawa, R.- Konishi, Y.- Chiba, I.- Katagi, T. Antennas and Propagation, IEEE Transactions on Volume: 47 3, March 1999, p. 482 -486.
- Castor: Structural dynamics in the MIR station. J.P.Vialaneix, P. Bousquet. Acta Astranomica v39, N7, 1996, p. 507−515.
- Comparison of different control approaches to drive SMA actuators Pons, J.L.- Reynaerts, D.- Peirs, J.- Ceres, R.- VanBrussel, H. Advanced Robotics, 1997. ICAR '97. Proceedings., 8th International Conferencen, 1997, p. 819−824.
- Control of a SMA robotic actuator via Thermoelectricity, J.M. Zerkus, M.J.Spizale, J.W. Akers, and T.F. Henderson and R.H. Thomson. ISA, North Carolina, 1985. p. 291−296.
- Controller for a high strain shape memory alloy actuator: quenching of limicycles Grant, D.- Hayward, V. Robotics and Automation, 1997. Proceedings., 1997 IEEE International Conferen on Volume: 1, 1997, p. 254 -259.
- Creating the illusion of shape for virtual environments Taylor, P.M.- Creed, A.J.- Sianaki, A.H.- Varley, C.J.- Moser, A. Innovative Actuators for Mechatronic Systems, IEEE Colloquium, 1995, p. 7/1 -7/7.
- Design and Analysys of a Deployable Truss for Large Modular Mech Antenna. Meguro A., Proceeding of the 18-th International Symposyum on Space Technology and Science (Kagoshima, Japan), ISTS Publication Committee, 1992, p. 485−490.
- Design and comparison of high strain shape memory alloy actuators Lu, A.- Grant, D.- Hayward, V. Robotics and Automation, 1997. Proceedings., 1997 IEEE International Conferen on Volume: 1, 1997, p. 260 -265.
- Design and fabrication of an erectable truss for precision segmented reflector application. Harold G. Bush, Catherine L. Herstrom. J. Spacecraft v.28 N2 1991, p. 251−257.
- Design of a SMA-actuated implantable drug delivery system Reynaerts, D.- Peirs, J.- Van Brussel, H. Micro Machine and Human Science, 1995. MHS '95., Proceedings of the Sixth International Symposium on, 1995, p.lll.
- Design of shape memory alloy actuator with high strain and variable structure control Grant, D.- Hay ward, V. Robotics and Automation, 1995. Proceedings., 1995 IEEE International Conferen on Volume: 3, 1995, p. 2305 -2312.
- Design, Prototyping and computer simulations of a novel large bending actuator made with a Shape memory alloy contractile wire/ Wang Guoping, Shahinpoor Mohsen //Smart mater, and struct. 1997, 6, N2, p. 214−221.
- Development of a SMA high performance robotic actuator. D. Reynaerts and H. Van Brussel. In Fifth international Conference on Advanced Robotics, Vol 2, p. 19−27, New York, NY, 1991.
- Development of Deployable Structures for Large Space Platform. Cox R.L. Nelson R.A. NASA CR-170 690, Oct. 1982.
- Dynamic modeling of a smart materials robot/ Ge S.S., Lee T.H., Gong J.Q. //AIAA Journal. 1998.-36, N8, p.1466−1478.
- Electro-thermo-mechanics of resilient contractile fiber bundles as robotic actuators Shahinpoor, M. Robotics and Automation, 1994. Proceedings., 1994. IEEE International Conference on, 1994, vol.2, p. 1502 -1507.
- Enginering aspects of Shape memory alloys. / T.W.Dueling, K.N.Melton, D. Stockel, C.M. Wayman, Eds.,/Toronto, 1990, p. 283−294, ButterworthHeinemann Ltd.
- Enhanced Cooling of Shape Memory Alloy Wires Using Semiconductor «Heat Pump» Modules. A.R.Shahin, P.H.Meckl, J.D.Jones, M.A.Thrasher. /J. Intell.Mat.Syst. Struct., Vol-5, p. 95−104, 1994.
- Force, compliance and position control for a space frame manipulator Cubero, S.N.- Billingsley, J. Mechatronics and Machine Vision in Practice, 1997. Proceedings., Fourth Annual Conference on, 1997, p.124−129.
- General stability criteria for a shape memory alloy position control system. R.B.Gorbet, D.W.L. Wang. Robotics and Automation, 1994. Proceedings., 1994. IEEE International Conference on, 1994, vol.2, p. 1602−1607.
- G-snakes: nonholonomic kinematic chains on Lie groups //Krishnaprasad, P. S.- Tsakiris, D.P. Decision and Control, 1994., Proceedings of the 33rd IEEE Conference on Vol. 3, 1994, p. 2955 -2960.
- Hyper-redundant robot mechanisms and their applications Chirikjian, G.S.- Burdick, J.W. Intelligent Robots and Systems '91. 'Intelligence for Mechanical Systems, Proceedings IROS '91. IEEE/RSJ International Workshop on, 1991, vol.1, p. 185 -190.
- Improving the response of SMA actuators Russell, R.A.- Gorbet, R.B. Robotics and Automation, 1995. Proceedings., 1995 IEEE International Conference on Volume: 3, 1995, p. 2299 -2304.
- Integration of Shape Memory Actuators in Miniature Robots. G. Pritchow, G. Kehl./ Actuator 96, Bremen, June 1996, p. 405−408.
- Interim Report for Study of Wrap-Rib Antenna Design Lockheed Missiles and Space Co., Rept. LMSC-D714653, July 1981.
- Light-weight transportable 2.4-meter tri-band antenna system for commercial and military satellites //Cleveland, J.R.- Parekh, S.V.- Johnson, A.F. MILCOM 97 Proceedings Volume: 1, 1997, p. 256 -260.
- Micro/miniature shape memory alloy actuator //Ikuta, K. Robotics and Automation, 1990. Proceedings., 1990 IEEE International Conference on, 1990, vol. 3, p. 2156 -2161.
- Module composition and deployment method on deployable modular-mesh antenna structures. Mitsunobu Watanabe, Akira Meguro. Acta Astranomica 1996, v.39, N7, p. 497−505.
- Motion Control of free floating variable geometry truss. Huang Shenguang, Natori M.C. Miura Kohichi. J of Guide Control and Dynamics. 1996.
- NASA Conference Publication, «Large Space System Technology 1981» Pts 1 and 2, NASA CP-2215, Nov. 1981.
- New Deployable Truss Concepts for Large Antenna Structures or Solar Concentrators, Takamatsu K.A., Onoda J., Journal of Spacecraft and Rockets, Vol. 28, N3, 1991, p. 330−338.
- Parallel computing for analysis of variable geometry trusses/ Miki Mitsunoti, Koita Takahiro //AIAA Journal-1996.34 N7, p. 1468−1473.
- Parallel formulation of the inverse kinematics of modular hyper-redundant manipulators /Chirikjian, G.S.- Burdick, J.W. Robotics and Automation, 1991. Proceedings., 1991 IEEE International Conference on, 1991, vol.1., p. 708−713.
- Pattern correction in large deployable reflector antennas with phased array feed Hariu, K.- Tsunoda, H.- Kawakami, Y.- Noguchi, T. Antennas and Propagation Society International Symposium, 1997. IEEE., 1997 Digest Volume: 2, 1997, vol.1, p. 844 -847.
- Robust Control of Flexible Structures Using Multiple Shape Memory Alloy Acttors Lashlee, R.- Butler, R.- Rao, V.- Kern, F. Aerospace Control Systems, 1993. Proceedings. The First IEEE Regional Conferee on, p. 798 -804.
- Shape control of adaptive structures /Pourki, F.//Control Applications, 1992., First IEEE Conference on, 1992, vol. 1, p. 342 -347.
- Shape memory actuators for automotive applications. Diter Stocker. /Enginering aspects of Shape memory alloys. / T.W.Duering, K.N.Melton, D. Stockel, C.M. Wayman, Eds.,/Butterworth-Heinemann Ltd. Toronto 1990, p. 283−294.
- Shape Memory Actuators for robotic applications. Y. Furuya and H. Shimada /Enginering Aspects of SMA, 1990, p. 338−355.
- Studies of micro actuators in Japan Fujita, H. Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conferen on, 14−19 May 1989, vol.3, p. 1559−1564.
- Study on feed systems of multibeam antennas for S-band mobile satellite communications Yamasa, Y.- Hariu, K.- Okamoto, T.- Otsu, Y. Antennas and Propagation Society International Symposium, 1996. AP-S. Digest Volume: 3, 1996, vol.3, p. 1688 -1691.
- Tetrobot: a modular system for hyper-redundant parallel robotics Hamlin, G.J.- Sanderson, A.C. Robotics and Automation, 1995. Proceedings., 1995 IEEE International Conference on Volume: 1, vol.1. 1995, p.154 -159.
- The alloy that remembers // Time. 1968. V92, 11. P. 42.
- The design and optimization of shape memory alloy actuator/ Wang Jian, Shen Ya-Peng //Lixue xuebao = Acta mech. sin. -1998. 30, N4, p. 449−460.
- The Elexator' as a robotic actuator Prior, S.D.- Warner, P.R. Robot Actuators, IEE Colloquium on, 1991, p. 5/1 -5/4.
- The shape control of a composite beam with embedded shape memory alloy wire actuators / Choi Sup, Lee Jung Ju// Smart Mater, and Struct. 1998−7, N6, p.759−770.
- The topological optimization for truss structures with stress constraints based on the exist-null combined model. Sui Yunkang, Yu Xin. Acta Mechanica sinca V.14, N4, 1998, p. 363−369.
- Toward evaluation of shape memory alloy actuators for endosurgery Koehn, K.- Payandeh, S. Systems, Man and Cybernetics, 1995. Intelligent Systems for the 21st Century. IEEE International Conference on Volume: 3, 1995, p. 1991−1996.
- Two dimensional deployable hexapod truss/ Onoda Jun Jiro, Fu Dan Ying, Minesugi Kenji //J. Spacecraft and Rockets. 1996. 33, N3, p. 416−421.83
- Variable structure control of shape memory alloy actuators /D.Grant, V. Hayward in IEEE Control Systems, 1997, p. 80−88.
- Быков В.Г., Разов А. И., Френкель M. M. Статический расчет проволочного ЭПФ-привода трансформируемых конструкций // Вестник ТГУ. 1998. Т. З, Вып.З. С. 291−292.
- Френкель М.М. Динамика рычажного механизма с проволочным приводом на основе эффекта памяти формы // Механизмы деформации и разрушения перспективных материалов. Сборник трудов XXXV семинара «Актуальные проблемы прочности». Псков. 1999. С. 51 -56.
- Френкель M. М. Расчет статической характеристики роторного мартенситного двигателя. Санкт-Петербург 2000, деп. в ВИНИТИ № 2309-В 00 от 24.08.00.