Структурное представление.
Основы патентоведения
По рис. 5.11 видно, что в наихудших случаях, при выходе из строя шести опорных узлов связи i-й и (i + 1)-й линий связи либо при выходе из строя до п опорных узлов связи главной (второй оси), в сети связи остается минимально необходимое для выполнения сетью своей главной полезной функции количество связей. Рассмотренная структура распадается на несвязанные части только в случае вывода из строя… Читать ещё >
Структурное представление. Основы патентоведения (реферат, курсовая, диплом, контрольная)
Далее происходит появление новых связей в рамках базовой структуры (переходы II —> III, II* III*, II** —?> III***) либо перестройка между базовыми вариантами. В конечном счете всякая структура «стремится» стать сетевой.
У каждой из структур есть свои достоинства и недостатки по сравнению с остальными. Так, иерархическая структура, как правило, — результат анализируемого объекта декомпозиции в пространстве и во времени.
Будучи представлен как структура, объект в целях разрешения проблемной ситуации (шаг 3 системного анализа) может быть подвергнут следующим преобразованиям:
- • (сО) добавить/убрать связи между элементами (например, убрать дублирующие связи);
- • (cl) изменить направление связей, в том числе ввести обратную связь;
- • (с2) изменить свойства связи, например, постоянную связь заменить на периодическую;
- • (сЗ) изменить физическую природу связи, например, одно поле заменить на другое или применить несколько полей;
- • (с4) представить связь как элемент или, напротив, элемент как связь;
- • (с5) добавить/удалить элементы из системы;
- • (сб) изменить организацию системы, например, линейную преобразовать в кольцевую или кольцевую в многосвязную;
- • (с7) провести перечисленные выше преобразования, но уже применительно к связям системы с внешней средой.

Рис. 5.10. Варианты развития структурной организации систем:
I — линейная; II — кольцевая (так называемый контур обратной связи); И* — звездчатая; II** — иерархическая; III — сотовая; III* — многосвязная; III** — иерархическая со слабыми связями; IV — сетевая Следует иметь в виду, что эволюции структуры от I к IV отвечают так называемая линейка Винера[1], согласно которой системы в ходе своего развития последовательно проходят стадии, на которых с увеличением их кибернетической сложности возникают и усиливаются следующие качества: устойчивость, помехоустойчивость, управляемость и самоорганизация [5.44, с. 29]. Причем каждое последующее качество в этом списке невозможно без наличия предыдущего.
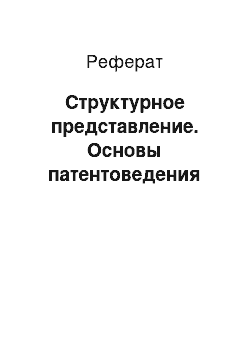
Стремление к повышению «живучести» сети связи (Z) «в условиях воздействия дестабилизирующих факторов при сокращении дополнительных линий связи» (S) двигало авторами патента RU 2 279 066 [5.45]. Для этого они предложили ввести в сеть дополнительные линии связи 4, соединяющие опорные узлы связи 3 так, как показано на рис. 5.11.
![Пример построения сетевой структуры с повышенной живучестью (восстановлено по [5.45, с. 5, 6]).](/img/s/8/84/1517984_2.png)
Рис. 5.17. Пример построения сетевой структуры с повышенной живучестью (восстановлено по [5.45, с. 5, 6]).
По рис. 5.11 видно, что в наихудших случаях, при выходе из строя шести опорных узлов связи i-й и (i + 1)-й линий связи либо при выходе из строя до п опорных узлов связи главной (второй оси), в сети связи остается минимально необходимое для выполнения сетью своей главной полезной функции количество связей. Рассмотренная структура распадается на несвязанные части только в случае вывода из строя трех и более рядом расположенных (соседних) рокад, что на практике реализуется крайне редко. Здесь, в этом техническом решении, переход (частичный) к сетевой структуре позволил повысить «живучесть», и, в то же время, обойти технический результат конкурентов, на котором основана сеть связи сухопутных войск Франции «РИТА».
- [1] Норберт Винер (1894—1964) — американский математик и философ, основоположник теории искусственного интеллекта. Автор знаменитой книги «Кибернетика, илиуправление и связь в животном и машине» (1946).