Противопожарные операции.
Технические средства автоматизации
Прохождение контура отверстия начинается с левого нижнего угла путем включения верхнего резака и движения транспортного модуля вверх со скоростью, необходимой для вырезания стенки резервуара. После достижения верхним резаком левого верхнего угла отверстия нижний резак занимает положение в левом нижнем углу, платформа транспортного модуля разворачивается на 90° вправо, сохраняя положение… Читать ещё >
Противопожарные операции. Технические средства автоматизации (реферат, курсовая, диплом, контрольная)
При пожарах резервуаров с топливом необходимо вырезать отверстие над уровнем горящего топлива в стенке резервуара для заведения через него средств пожаротушения. Ручные операции по вырезанию отверстий, когда газосварщиков на люльке автоподъемников поднимают к горящему резервуару, являются чрезвычайно опасными для их жизни и здоровья, т.к. в случае внезапного выброса нефтепродуктов через край резервуара или образуемую прорезь в стенке возможна гибель газосварщиков или тяжелые ожоговые травмы.
Для автоматизации этой операции возможно применение робота вертикального перемещения. В качестве технологического модуля робота используют блок газовой резки, который отличается простотой аппаратного оформления и возможностью дистанционного управления.
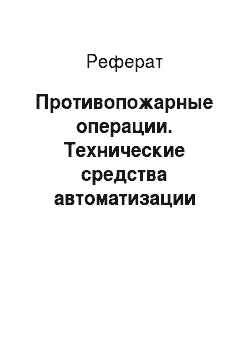
Схема пожарного робота приведена на рис. 3.6.

Рис. 3.6. Схема пожарного робота:
- 1 — транспортный модуль, 2 — технологический модуль, 3 — педипулятор,
- 4 — резаки, 5 — траектория движения робота, б — контур вырезаемого отверстия, 7 — уровень горящей жидкости
Основными модулями робота являются транспортный и технологический. Транспортный модуль связан с блоком управления электрическими коммуникациями, расположенными в защитном кожухе. В этом же теплоизолированном кожухе размещены питающие коммуникации, по которым на борт робота подаются сжатый воздух (для приводов транспортного модуля), рабочие газы (для функционирования резаков технологического модуля), а на управляющие клапаны и устройство запуска резаков, установленных по схеме сдвоенного технологического инструмента, — низковольтное напряжение.
Транспортный модуль имеет две платформы, каждая из которых снабжена группой вакуумных захватных устройств из термостойкого материала. Обе платформы связаны между собой через узел поворота. Поворот может быть осуществлен относительно любой платформы, находящейся в фиксированном положении.
Технологический модуль размещается на транспортном модуле и содержит блок резки, установленный на кронштейне, длина которого определяется размерами вырезаемого отверстия. Подача рабочих газов для выполнения резки осуществляется посредством дискретных клапанов, которые могут находиться как на борту робота, так и в наземном модуле управления.
Алгоритм выполнения противопожарной операции заключается в установке робота на исходную позицию на стенке резервуара, перемещении робота по стенке до уровня горящей жидкости, вырезании отверстия в стенке, возврате робота на исходную позицию и снятии робота со стенки резервуара. Установка робота на исходную позицию и его снятие с резервуара производятся автоматически с пожарной машины при помощи телескопических устройств.
Вид пожарного робота на резервуаре представлен на рис. 3.7.
Перемещение робота по резервуару до уровня горящей жидкости производится программным способом, обеспечивающим дискретное пошаговое вертикальное движение транспортного модуля.

Рис 3.7. Пожарный робот на резервуаре
При пересечении уровня горящей жидкости датчик температуры, установленный на кронштейне технологического модуля, реагирует на перепад температур стенки резервуара, идентифицируя тем самым расположение транспортного модуля под уровнем горящей жидкости в зоне более низких температур и установку блока резки над уровнем, как это предусмотрено технологией выполнения противопожарной операции. После этого осуществляется вырезание отверстия в стенке резервуара.
Прохождение контура отверстия начинается с левого нижнего угла путем включения верхнего резака и движения транспортного модуля вверх со скоростью, необходимой для вырезания стенки резервуара. После достижения верхним резаком левого верхнего угла отверстия нижний резак занимает положение в левом нижнем углу, платформа транспортного модуля разворачивается на 90° вправо, сохраняя положение технологического модуля с резаками в неподвижном состоянии. После включения нижнего резака начинается движение вправо с вырезанием верхней и нижней части контура. При достижении резаками правой границы контура отверстия производится включение нижнего резака и поворот платформы еще на 90°, что обеспечивает возможность движения робота вниз. В правом нижнем углу происходит замыкание контура. Вырезанный металл под действием собственной силы тяжести выпадает с внешней стороны резервуара, при этом робот находится в безопасном положении вне зоны под контуром. Далее робот продолжает движение вниз на исходную позицию для снятия со стенки резервуара.
В целях защиты робота от теплового излучения, исходящего от нагретой поверхности перемещения, корпус закрывается обшивкой из теплоотражающей металлизированной кремнеземной ткани. При этом защита выполнена в виде двух оболочек, одна из которых закрывает внутреннюю платформу, а другая — всю конструкцию в целом. Охлаждение конструкции робота под оболочками обеспечивается за счет протока отработанного воздуха из пневмоэлементов приводных систем робота.