Совершенствование технологии технического обслуживания и ремонта модернизируемого мостового крана КМ-10
Для безопасной и надежной эксплуатации гидропривода в системе предусмотрены следующие приборы безопасности: тормозной клапан, предохранительный клапан, гидро аккумулятор, теплообменник, приборы контроля. Кроме этого система гидропривода выполнена по схеме комбинированной циркуляцией эидкости, при этом система подпитки компенсирует утечки при работе основного контура, стабилизирует температурный… Читать ещё >
Совершенствование технологии технического обслуживания и ремонта модернизируемого мостового крана КМ-10 (реферат, курсовая, диплом, контрольная)
Содержание Введение
1. Анализ существующей конструкции
2. Расчет механизма подъема груза
2.1 Исходные данные и выбор схемы механизма
2.2 Выбор схемы полиспаста и крюковой подвески
2.3 Расчёт и выбор каната
2.4 Расчёт уравнительного балансира
2.5 Расчёт грузового барабана
2.6 Расчёт мощности и выбор гидродвигателя
2.7 Подбор муфт
2.8 Подбор тормоза
2.8.1 Расчёт гидроцилиндра
2.8.2 Определение параметров пружины
3. Расчёт механизма передвижения тележки
3.1 Исходные данные и выбор схемы механизма
3.2 Подбор ходовых колёс
3.3 Определение сопротивлений передвижению
3.4 Расчёт мощности и подбор гидродвигателя
3.5 Подбор муфт
3.6 Определение тормозного пути
3.7 Проверка на сцепление ходовых колёс с рельсом
4. Расчет механизма передвижения крана
4.1 Исходные данные и выбор схемы механизма
4.2 Подбор ходовых колес
4.3 Определение сопротивления передвижению
4.4 Расчет мощности и подбор мотор — редуктора
4.5 Подбор муфты
4.6 Расчет тормозного момента и выбор тормоза
4.7 Проверка на сцепление ходовых колес с рельсом
4.8 Проверка электродвигателя по условию пуска
5. Прочностные расчеты механизмов
5.1 Расчет механизма подъема груза на прочность
5.1.1 Расчет вала барабана на прочность
5.1.2 Уточненный расчет вала барабана
5.1.3 Подбор подшипника
5.1.4 Расчет барабана на прочность
6. Разработка гидропривода мостового крана
6.1 Исходные данные и выбор схемы
6.2 Выбор рабочей жидкости
6.3 Расчет исполнительных двигателей
6.3.1 Расчет гидроцилиндра тормоза механизма подъема
6.3.2 Расчет гидромотора механизма подъема
6.3.4 Расчет гидромоторов механизма передвижения тележки
6.4 Расчет диаметров трубопроводов
6.4.1 Определение диаметров трубопроводов
6.4.2 Определение длины гидролиний
6.4.3 Определение диаметров трубопроводов на питание гидромоторов
6.5 Выбор распределителей и регулирующей аппаратуры
6.5.1 Выбор гидрораспределителей
6.5.2 Выбор предохранительного клапана
6.5.3 Выбор блока переливных и подпиточных клапанов
6.5.4 Выбор тормозного клапана
6.5.5 Выбор делителей потока
6.5.6 Выбор обратных клапанов
6.5.7 Выбор регулятора потока
6.5.8 Выбор гидроаккумулятора
6.6 Выбор вспомогательной аппаратуры
6.6.1 Выбор фильтра
6.6.2 Выбор манометра
6.7 Расчет потерь давления в гидролинии
6.7.1 Расчёт потерь давления при температуре tmin=+C
6.7.2 Расчет потерь давления при рабочей температуре
6.8 Расчет и выбор насоса
6.9 Расчёт режимов работы
6.9.1 Расчёт гидравлической характеристики трубопровода
7. Расчет металлоконструкций крана
8. Электрическая часть
9. Специальная часть
10. Охрана труда
11. Экономическая часть Заключение Список литературы
Введение
В данном дипломном проекте производится совершенствование технологии технического обслуживания и ремонта модернизируемого мостового крана КМ-10.
В настоящее время этот кран находится в цехе вакуумных установок ЦРПО ОАО «ССГПО» и применяется для внутрицеховых погрузочно-разгрузочных работ, в частности для ремонта цехового оборудования.
Модернизация связна с технологической необходимостью предприятия: в цех вакуум-насосных установок поступили новые вакуум-насосные станции, имеющие обычную массу 12,5 тонн. В настоящее время для замены установок кран вынужден работать с заведомым десятипроцентным перегрузом, что недопустимо, или же должна производится разборка установок на блоки, что удорожает монтаж и удлиняет сроки модернизации цеха.
В связи с тем, что новые подъёмные машины на данный момент имеют достаточно высокую стоимость, решено было модернизировать существующий кран, при этом внеся в него следующие изменения: заменить электрический привод механизмов подъёма и передвижения тележки приводом гидравлическим, а привод механизма передвижения крана выполнить по блок-приводной схеме. Подобная замена позволит снизить динамические нагрузки на кран, благодаря плавности включения и многопоточности силовой схемы. К тому же блок-приводы и гидроаппараты имеют значительно меньшие габаритно-весовые данные, поэтому применяя именно эти узлы и агрегаты удаётся не увеличить собственную массу крана. Помимо этого, исполнительные органы гидромашины имеют меньший момент инерции и более высокое быстродействии (в сравнении с электрическим приводом), что в сочетании с относительно широким диапазоном бесступенчатых регулировок (диапазон дроссельного регулирования потока позволяет достигать диапазона 1:1500) позволит варьировать скорости механизмов и повысить частоту реверса, что может быть необходимо при монтаже и демонтаже цехового оборудования. Для усиления несущей способности моста (при необходимости) по нижнему поясу главных балок установить ферменную конструкцию, это позволит увеличить их прочность и жесткость, не увеличивая при этом высоту крана (от головки рельса).
Таким образом, данные способы позволяют провести реконструкцию крана в короткие сроки, что благоприятно скажется на её стоимости (она будет меньше), а применение гидропривода позволит получать необходимые рабочие скорости, а также сократить количество и продолжительность технических обслуживаний.
В специальной части дипломного проекта разработана технология технического обслуживания и ремонта крана с гидроприводом.
кран тормоз гидропривод прочность
1. Анализ существующей конструкции При перегрузочных работах очень часто рабочие скорости крана оказываются излишними. Для получения нескольких скоростей рабочих органов возможно применение следующих кинематических схем:
1. применение многоскоростных двигателей;
2. применение двух барабанного привода;
3. применение специальных планетарных муфт;
4. применение планетарных редукторов;
5. применение гидропривода.
Рассмотрим достоинства и недостатки каждого варианта.
При использовании многоскоростных электродвигателей значительно увеличиваются габаритные размеры и масса привода, что увеличивает нагрузку на металлоконструкцию крана и давление на подкрановые пути. При этом невозможно плавно (бесступенчато) регулировать скорости в широких диапазонах.
Во втором рассматриваемом варианте значительно усложняется конструкция и габаритные размеры привода.
Рисунок 1 — Кинематическая схема с планетарной муфтой.
В случае применения планетарной муфты (рисунок 1) увеличиваются габариты привода и требуются дополнительные тормоз и электродвигатель. Кроме этого, планетарная муфта — вещь довольно дорогостоящая, и обладает сравнительно невысокой долговечностью и надёжностью.
Рисунок 2 — Кинематическая схема с двухбарабанным приводом.
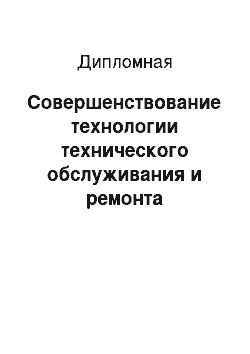
Рисунок 3 — Кинематическая схема привода с планетарным редуктором: 1- основной двигатель; 2- тормоз; 3- редуктор; 4- открытая передача; 5- барабан; 6- дополнительный двигатель; 7- тормоз.
В случае применения планетарного редуктора (Рисунок 3) также требуются дополнительный тормоз и электродвигатель. К тому же планетарный редуктор дороже обычных цилиндрических.
В случае использования гидропривода мы имеем следующие основные недостатки:
1. Утечки рабочей жидкости через уплотнения и зазоры, что снижает КПД установки. Необходимо повышение герметичности систем посредством высокой точности и частоты поверхностей сопрягаемых деталей;
2. Нагрев рабочей жидкости, что в ряде случаев требует применение специальных охладительных устройств и средств тепловой защиты;
3. Необходимость обеспечения в процессе эксплуатации чистоты рабочей жидкости и защита от проникновения в неё воздуха;
4. КПД гидропередачи ниже, чем у механической.
Наряду с вышеперечисленными недостатками гидропривод имеет следующие достоинства, которые не наблюдаются в других видах приводов:
1. Широкий диапазон бесступенчатого регулирования скорости выходного звена, что позволяет осуществить рациональный режим работы исполнительных органов машины;
2. малая масса, приходящаяся на единицу передаваемой мощности;
3. возможность получения характеристик в соответствии с нагрузочными характеристиками машины, что улучшает эксплуатационные качества последней;
4. высокое быстродействие, так как момент инерции ротора гидродвигателя и его постоянная времени в несколько раз меньше, чем у равного по мощности электродвигателя;
5. возможность передачи больших сил и мощностей, а также осуществление больших передаточных чисел при относительно небольших размерах и массе гидроустройств;
6. простота реверсирования без необходимости изменения направления вращения приводного двигателя, а также возможность получения плавных движений и частых быстрых переключений на ходу машины;
7. надёжная смазка трущихся поверхностей, благодаря применению в качестве рабочих жидкостей минеральных масел;
8. простота предохранения приводного двигателя и исполнительных органов машины от перегрузок.
При этом при правильном выборе гидросхем и конструировании гидроузлов, некоторые из вышеперечисленных недостатков гидропривода возможно устранить или же значительно уменьшить их влияние на работу машины. Тогда преимущества гидропривода становятся столь существенны, что с ними нельзя не считаться при выборе типа привода машины и механизмов.
Рисунок 4 — Разомкнутая циркуляция.
По схеме циркуляции рабочей жидкости приводы подразделяются на привод с разомкнутой (открытой) схемой циркуляции (рисунок 4) и замкнутой схемой циркуляции (рисунок 5). В первом случае рабочая жидкость из гидромотора вся сливается в бак и затем из бака насосом вновь подается к исполнительным механизмам. Реверс отрабатывается золотниками гидрораспределителей.
Во втором случае, жидкость циркулирует между насосом и исполнительным органом, не возвращаясь в бак. В этом случае реверс отрабатывается изменением направление возвращения вала гидронасоса.
Рисунок 5 — Замкнутая циркуляция.
2. Расчет механизма подъема груза
2.1 Исходные данные и выбор схемы механизма.
В качестве исходных данных для расчета механизма подъема принимается:
m=16 т — грузоподъёмность крана;
H=10 м — высота подъёма груза;
V=7,7 м/мин — скорость подъёма;
ПВ=15% (лёгкий) — режим работы механизма.
В связи с тем, что на реконструируемом кране решено устанавливать гидропривод, то предпочтительнее в механизме подъема применить без редукторную схему привода с высокомоментным гидродвигателем. Поскольку гидродвигатели изготавливаются как с обычным исполнением выходного конца вала, так и с исполнением в виде венца зубчатой полумуфты, то схема установки грузового барабана может иметь следующий вид (с последующим уточнением):
Рисунок 6 — Схема установки грузового барабана. 1 — гидродвигатель; 2 — зубчатая муфта; 3 — барабан; 4 — опора Поскольку привод является безредукторным, то очевидно, что тормоз будет установлен на оси барабана. В этом случае тормоз дает наибольшую надежность.
2.2 Выбор схемы полиспаста и крюковой подвески.
Для кранов мостового типа, в которых механизм подъема груза располагается не посредственно над поднимаемым грузом рекомендуется применять сдвоенные полиспасты. Это снижает вероятность раскачивания грузов. Кроме этого в одинарных полиспастах груз при подъеме и опускании перемещается не по вертикали, а по наклонной траектории; также имеет место большое стремление к кручению крюковой подвески.
Основным же недостатком одинарных полиспастах является нежелательная изменение нагрузки, действующей на опоры барабана при подъеме или опускании груза, что крайне нежелательно в мостовых кранах, где постоянство давлений на опоры барабана во время подъема или спуска груза важно для обеспечения равномерной загрузки металлоконструкции моста под обоими рельсами.
По нормали ПО «Сибтяжмаш» выбираем крюковую подвеску типоразмера 4−16−406 по стандарту: 4−16−406 ОСТ 24.191.08−81 ПО «Сибтяжмаш».
Лёгкому режиму работы соответствует группа режимов работы М5.
Вместо среднего уравнительного блока предлагаю применить уравнительный балансир (Рисунок 7). Это позволит увеличить срок службы каната за счёт ликвидации его износа на уравнительном блоке и за счёт дополнительной подкрутки при набегании на барабан обеих ветвей каната. Кроме того, применение уравнительного балансира снижает опасность травмирования стропольщика при обрыве крюковой подвески, так как в этом случае подвеска останется на одной из ветвей каната.
2.3 Расчёт и выбор каната Канат выбираем в соответствии с нормами Госгортехнадзора РК, и с учётом необходимой долговечности.
Рисунок 7 — Схема запасовки каната: 1 — грузовой барабан; 2 — канат; 3 — верхний блок; 4 — уравнительный балансир; 5 — крюковая подвеска Вес номинального груза и грузовой подвески определяем по формуле
(1)
где Gсуммарный вес, Н;
mгрмасса номинального груза, кг;
mпмасса крюковой подвески, кг;
gconst; g=9.807 Н/кг;
По [1], Таблица 2.2 находим КПД блоков полиспаста:; КПД обводных блоков:
Определим максимальное статическое усилие в канате по формуле:
(2)
где Smax — максимальное статическое усилие, Н;
G — суммарный вес, Н;
— КПД блока;
а — число ветвей каната, набегающих на барабан;
iп — кратность полиспаста;
t — число направляющих блоков;
Определим разрывное усилие каната по формуле:
(3)
где: Fo — разрывное усилие каната, н;
zp — минимальный коэффициент использования каната, zp=4.5, [2];
S= Smax — максимальное натяжение каната, Н;
При выборе типоразмера каната следует исходить из следующих условий: разрывное усилие каната должно быть выше расчётного разрывное усилие каната; должно выполняться соотношение между диаметром выбранного каната и диаметром блока крюковой подвески.
Согласно вышеперечисленным условиям из таблицы ГОСТа выбираем типоразмер каната: принимаем канат двойной свивки типа ЛК-Р конструкции 6*19(1+6+6/6)+1 о.с. 14.0-Г-В-С-О-Н-1470 ГОСТ 2688–80, имеющий следующие характеристики:
— разрывное усилие, кН, не менее 92.85
— диаметр каната, мм 14.0
— расчётная площадь сечения проволок, 74.40
— масса 1000 м смазанного каната, кг 728
— назначение каната грузовое
— марка проволоки высшая
— маркировочная группа, МПа 1470
— сочетание направления свивки элементов одностороннее Определим диаметр блока в крюковой подвеске по формуле:
(4)
где D2 — диаметр блока в подвеске, мм;
h2 — коэффициент выбора диаметров, [2]; h2=20;
d — диаметр каната, мм;
Принимаем диаметр блока равным стандартному в крюковой подвеске.
Определим диаметр верхних блоков по формуле:
(5)
где: D2 — диаметр верхнего блока, мм;
h2 — коэффициент выбора диаметров, [2];
d к — диаметр каната, мм;
Согласно правилам ГГТН и в целях повышения унификации деталей принимаем диаметр верхних блоков равным диаметру блоков в крюковой подвеске: 406 мм.
2.4 Расчёт уравнительного балансира Межосевое расстояние между точками крепления канатов в уравнительном балансиреАур. бможно определить из условия одинакового по знаку отклонения каната на внутренних блоках крюковой подвески и из условия максимально допускаемого отклонения при набегании на блок:
Ввн Аур. б Ввн+2hminур.б*tg[]
где: Ввн — расстояние между осями крайних внутренних блоков крюковой подвески;
hminур.б — минимально допускаемое расстояние между осью блоков крюковой подвески и продольной осью уравнительного балансира;
[]- максимально принимаемое при предварительных расчётах значение угла отклонения каната от оси ручья блока, []=; [1];
Рисунок 8 — Схема установки уравнительного балансира Определим минимально допускаемое расстояние между осью блоков крюковой подвески и продольной осью уравнительного балансира по формуле
(6)
где: D3 — диаметр верхних блоков, мм;
Определим расстояние Аур. б по формуле Согласно требованиям ряда нормальных размеров межосевое расстояние принимаем равным 280 мм. Остальные размеры установки уравнительного балансира можно принять по следующим ориентировочным соотношениям:
а) длина уравнительного балансира:
(7)
Принимаем 355 мм;
б) ширина уравнительного балансира:
(8)
Принимаем 180 мм;
в) высота уравнительного балансира:
(9)
Принимаем 140 мм;
г) длина корпусов опор уравнительного балансира:
(10)
Принимаем 200 мм;
д) расстояние до оси уравнительного балансира:
(11)
Принимаем 90 мм.
2.5 Расчёт грузового барабана Определим диаметр барабана, замеренный по центрам сечения витка каната по формуле:
; (12)
Где Dб — диаметр барабана, мм;
dk — диаметр каната, мм;
h1 — коэффициент выбора диаметров,[2]; h1=18;
Согласно требованиям ряда нормальных диаметров принимаем диаметр барабана равным 320 мм.
Определим длину барабана по формуле:
; (13)
где Lб — длина барабана, мм;
Lн — длина одного нарезного участка, мм;
Lо — длина гладкого среднего участка, мм; (120−130) [3]
Lк — длина одного гладкого концевого участка, мм;
Определим длину одного нарезного участка по формуле:
(14)
Где t — шаг нарезки, мм;
zp — число рабочих витков для навивки половины полной рабочей длины каната;
zнепр.=1.5 — число неприкосновенных витков, требуемых для разгрузки деталей крепления каната на барабане;
zкр.=3−4 — число витков для крепления конца каната.
Определим число рабочих витков по формуле:
(15)
где: Lкр — рабочая длина каната, соответствующая одному нарезному участку, мм;
Dб — диаметр барабана, м.
Определим рабочую длину каната по формуле:
; (16)
Где H — высота подъёма груза, м;
Uп — кратность полиспаста;
Принимаем 40 витков.
Определим шаг нарезки по формуле:
; (17)
где: dk — диаметр каната, мм;
Принимаем стандартное значение шага равным 16 мм.
Определим длину одного нарезного участка:
Длину гладкого концевого участка можно определить из соотношения:
(18)
где: dk — диаметр каната, мм;
Принимаем 63 мм.
По формуле (13) определим длину барабана:
Полученный барабан на 261 мм длиннее барабана, установленного на заводе — изготовителе. Для того чтобы сократить сроки реконструкции крана и тележки предлагаю увеличить диаметр барабана до 400 мм; сократить длину гладкого среднего участка до 120 мм; длину концевого главного участка оставить прежней.
По формуле (15) определим число рабочих витков:
Принимаем 32 витка По формуле (14) определим длину одного нарезного участка:
По формуле (13) определим длину барабана Полученная длина удовлетворяет габаритам заводского барабана, имевшего при диаметре 400 мм длину 1465 мм.
Определим толщину стенки барабана по формуле:
(19)
где: Dб — диаметр барабана, мм;
Принимаем 18 мм Определим диаметр барабана по дну канавок по формуле:
(20)
Где Dбо — диаметр барабана по дну канавок, мм;
Dб — диаметр барабана по центрам сечения витка каната, мм;
Dk — диаметр каната, мм;
Определим диаметр максимальной окружности, описываемой крайней точкой установки барабана:
(21)
где: Dб — диаметр барабана, мм;
Принимаем 500 мм.
Так как габаритные размеры барабанов совпадают, в целях сокращения времени реконструкции предлагаю использовать те же монтажные отверстия.
2.6 Расчёт мощности и выбор гидродвигателя Выбор гидродвигателя осуществляем по крутящему моменту и рабочему объему. Определим конструктивные параметры гидромотора по формуле:
; (22)
Где q — объем рабочей камеры, см ;
T — момент на валу гидромотора, Нм;
Р — рабочее давление гидромотора, МПа; Принимаем давление равным 20 МПа, /4/
К — коэффициент К =1,05/1,15;/4/;
Определяем крутящий момент по формуле:
; (23)
Где G — вес поднимаемого груза, Н;
— диаметр барабана, м;
— кратность полиспаста;
Определяем вес поднимаемого груза по формуле:
; (24)
Где — масса номинального груза, кг;
— масса крюковой подвески, кг;
g — весовая постоянная, Н/кг;
G = (16 000+314)· 9,807 = 159 991,39 Н Т=
По формуле (22) определим рабочий объем гидромотора:
Выбираем гидромотор /4/; индекс типоразмера МР-4; индекс модели 2800 имеющий следующие параметры:
— рабочий объем, см 2780
— перепад давлений, МПа Рабочий 21,0
Номинальный 25,0
Пиковый 32,0
— крутящий момент на валу, Н· м 8370
— верхний предел рабочей скорости вращения 170
— отдаваемая мощность, кВт 51,46
— общий КПД 0,85
— вес на 1 см рабочего объема, кг 0,15
— диаметр выходного конца вала, мм 50
— момент инерции вращающихся масс, кг· м 1,0733
После выбора гидромотора уточним схему установки грузового барабана. Радиальный поршневой гидромотор имеет выходной конец вала цилиндрический или конусный. Поэтому для соединения вала гидромотора с валом барабана используем обычную зубчатую муфту с тормозным шкивом. То есть схема установки барабана будет иметь следующий вид:
Рисунок 9 — Схема установки грузового барабана 1 — Гидродвигатель; 2 — Соединительная муфта; 3 — Тормоз; 4 — Барабан При этом, используя муфту с тормозным шкивом, получаем следующие преимущества: простота конструкции, удобство монтажа и обслуживания.
2.7 Подбор муфт Для соединения валов гидродвигателя и барабана принимаем муфту зубчатую с тормозным шкивом МЗЛ-600 (3).
Проверим муфту по крутящему моменту:
; (25)
Где — крутящий момент двигателя, Н· м;
К — коэффициент режима работы, К=1,1; /3/;
Максимальный крутящий момент, передвигаемый муфтой равен 11 800 Нм.
При выборе муфты должно выполняться условие:
Где — максимальный крутящий момент передаваемый муфтой, Н· м;
— расчетный крутящий момент, Н· м;
11 800>10 518,2
Условия выполняется.
Выбранная муфта имеет следующие характеристики:
— максимальный крутящий момент, Н· м 11 800
— диаметр тормозного шкива, мм 600
— момент инерции, кг· м 8,13
— диаметр соединяемых валов, м (не более) 105
2.8 Подбор тормоза Тормоз подбираем по тормозному моменту, определённому по формуле:
; (26)
Где коэффициент запаса торможения, 1,5
кутящий момент при торможении, Нм
; (27)
Где грузоподъёмность крана, кг;
диаметр барабана, м;
КПД привода;
кратность полиспаста;
U — передаточное число привода.
Данный тормозной момент развивают тормозы серии ТКП и ТКТГ, но в данном случаедиаметр тормозного шкива: 600 ммони имеют большую массу и габариты. Поэтому предлагаю заменить стандартное тормозное устройство, имеющее следующую схему:
Рисунок 10 — Схема тормозного устройства 1 — гидроцилиндр; 2- тормозные колодки; 3- тормозной шкив Определим минимальный диаметр шкива по формуле:
(28)
Где тормозной момент, Нм;
f — коэффициент трения на поверхности колодок. Принимаем равным f=0,42, /5/
допускаемое удельное давление для выбранного фрикционного материала. МПа; ,/5/
По формуле (28) получим:
Согласно нормальному ряду диаметров ближайшее значение-560 мм. Очевидно, что целесообразно тормозной шкив совместить с зубчатой муфтой (что было сделано ранее), при этом увеличится срок службы тормозного шкива, за счет снижения давления колодок на шкив.
Определим давление колодок на шкив по формуле:
; (29)
Где тормозной момент, Нм
Dдиаметр тормозного шкива, м
fкоэффициент трения Определим усилие замыкания пружины по формуле:
(30)
Где a; b; cразмеры тормоза, назначаемые конструктивно, мм.
а = 320 мм; b = 630 мм
Nдавление колодок на шкив, Н;
По полученному значению усилия замыкания пружины проведем расчет пружины и определим ее параметры. Так как пружина имеет встроенное исполнение, то есть располагается внутри гидроцилиндра, то в начале определим основные размеры гидроцилиндра.
Определим фрикционный материал на износ по формуле:
(31)
Где удельное давление, МПа
0,6-допускаемое давление, МПа
N-давление колодок на шкив, Н угол обхвата колодкой шкива, рад В-ширина колодки, м
— диаметр тормозного шкива, м
Определим ширину колодки по формуле:
(32)
Принимаем ширину тормозной колодки равной 200 мм.
По формуле (31) получаем удельное давление равным:
Выше указанное условие выполняется.
2.8.1 Расчёт гидроцилиндра Определим конструктивные параметры гидроцилиндра по формуле:
; (33)
Где d-диаметр поршня, мм
Fусилие на штоке, Н Ррабочее давление в системе, Па
К-коэффициент потерь, 1,1−1,3; /4/;
Кроме этого, параметры гидроцилиндра определяем исходя из следующих технических характеристик:
— максимальная статическая нагрузка равна усилию замыкания пружины и составляет 14 160 Н.
— максимальная скорость перемещения поршня составляет 0,5 м/сек.
— время разгона от 0 до 0,5м/с составляет 0,1 с.
Определим силу инерции в период разгона:
(34)
Где статическая нагрузка, Н весовая постоянная, Н/кг время разгона, с
максимальная скорость перемещения поршня, м/с Общее усилие на поршне определим по формуле :
(35)
Где статическая нагрузка, Н инерционная нагрузка, Н Определим путь поршня до установившегося движения при постоянном ускорении:
(36)
Где L-путь поршня, мм
— максимальная скорость, м/с Определим диаметр силового цилиндра по формуле:
(37)
Где Р — обще усилие на поршне, Н р — рабочее давление в системе, Па К — коэффициент потерь
По формуле (2,34) определим диаметр поршня:
Принимаем стандартный гидроцилиндр /4/, типа А1−80×45×25 ОСТ 22−1417−79,имеющий следующие характеристики:
— внутренний диаметр, мм 80
— диаметр штока, мм 45
— ход поршня максимальный, мм 25
— максимальное рабочее усилие, Н 44 132
— рабочее, МПа 160
Определим площадь поршня по формуле:
(38)
где dдиаметр поршня, мм
2.8.2 Определение параметров пружины Для надежного замыкания колодок и удержания груза пружина должна развивать усилие, равное 14 160Н при условии, что внешний диаметр пружины будет равен 80 мм:
Для расчета пружины уточним некоторые исходные данные:
=14 160 Н — сила пружины при рабочей деформации;
=80 мм — рабочий ход пружины;
=0,5 м/с — наибольшая скорость перемещения подвижного конца пружины;
=80 мм — наружный диаметр пружины;
Так как пружина предназначена для замыкания колодок тормоза, то есть испытывает циклическое и статическое нагружения, то по рекомендациям /6/, данная пружина относится ко второму классу пружин.
Определим силу пружины при максимальной деформации по формуле
(39)
Где — относительный инерционный зазор пружины сжатия, =0,050,25; /6/;
Исходя из вышеперечисленных условий, останавливается на витке со следующими данными (номер пружины 62) /6/:
— сила пружины при максимальной деформации, Н 15 000,0
— диаметр проволоки, мм 16,0
— наружный диаметр пружины, мм 80
— жесткость одного витка, Н/мм 2452,5
— максимальная деформация одного витка, мм 6,116
— максимальное касательное напряжение при кручении, МПа 800
Определим критическую скорость, м/с, по формуле:
(40)
Где максимальное касательное напряжение кручения, МПа;
усилие замыкания, Н;
сила пружины при максимальной деформации, Н Проверим принадлежность пружины ко второму классу чрез условие соударения витков пружины:
Итак:
Очевидно, что соударения витков не происходит — 0,09<<1
Определим жесткость пружины по формуле:
(41)
Где G — модуль сдвига, МПа; для пружинной стали:, [6];
d — диаметр проволоки, мм;
Определим число рабочих витков пружины по формуле:
(42)
Где c1 — жёсткость одного витка, Н/мм;
витков Уточним жёсткость пружины по формуле:
(43)
При полутора нерабочих витков полное число витков находим по формуле:
n1=n+n2; (44)
где: n2=1.5- число опорных витков, шт.;
n1=15.5+1.5=17 витков Определим средний диаметр пружины по формуле:
D=D1-d, мм (45)
где: D1- наружный диаметр пружины, мм;
d — диаметр проволоки, мм;
D=80−16=64
Определим предварительную деформацию пружины по формуле:
; (46)
Где F1— сила пружины при предварительной деформации, Н. Принимаем 20Н;
Определим рабочую деформацию пружины, мм;
(47)
Определим максимальную деформацию пружины по формуле:
(48)
где: F3- сила пружины при максимальной деформации, Н;
Определим длину пружины при максимальной деформации по формуле:
l3=(n1+1-n3)· d, (49)
где: n3- число обработанных витков пружины;
l3=(17+1−1.5)*16=264
Определим длину пружины в свободном состоянии по формуле:
lo= l3+S3, мм (50)
lo=264+94.8=358.8
Определим длину пружины при предварительной деформации по формуле:
l1= lо-S1, мм (51)
l1= 358.8−0.12=358.68
Определим длину пружины при рабочей деформации:
l2= lо-S2, мм (52)
l2= 358.8−89.49=269.31
Определим шаг пружины в свободном состоянии по формуле:
(53)
Где — максимальная деформация одного витка, мм;
3. Расчёт механизма передвижения тележки
3.1 Исходные данные и выбор схемы механизма Для возможности расчёта механизма передвижения тележки необходимы следующие исходные данные:
m = 16 000 кг — грузоподъёмность крана;
V = 32 м/мин — скорость передвижения тележки;
ПВ = 15% (лёгкий) — режим работы.
На реконструируемом кране применена схема с боковым расположением привода. Данная схема исключает трудоёмкую работу по выверке и центровке редуктора и не требует устройства специальных опор площадок под редуктор на раме тележке.
Недостаток нецентрального расположения привода — неодновременность начала движения приводных колёс, так как крутящий момент выходного вала редуктора сначала передаётся на ближайшее к нему колесо и только после того, как трансмиссионный вал закрутится на угол, определяемый его крутильной жёсткостью и передаваемый крутящий момент, приводит во вращение второе приводное колесо. Так, при колее тележки два метра и при угле закручивания вала на на один метр, второе колесо начинает движение после того, как первое колесо пройдёт путь, равный 4.4 мм. Боковые зазоры в зубчатых муфтах ещё более увеличивают этот путь. Запаздывание начала движения одного из приводных колёс приводит к перекосам тележки при пусках и торможениях, и может являться одной из причин интенсивного износа ходовых колёс. Кроме того, при ремонте механизма с боковым расположением редуктора, заменить приводные колёса гораздо труднее.
Поэтому, в связи с установкой гидропривода механизма подъёма предлагаю гидрофицировать и механизм передвижения тележки. Применив при этом раздельный привод.
В связи с тем, что скорость передвижения тележки относительно невысокая — 32 м/мин, то данный механизм можно не оснащать тормозом, то есть скорость её составляет 0.53 м/сек. Тормозами же оборудуются «машины (тележки), предназначены для работы в помещениях на надземном рельсовом пути, перемещаются со скоростью более 0.53 м/сек».
Кинематическая схема привода имеет следующий вид:
Рисунок 11 — Кинематическая схема механизма передвижения тележки 1 — двигатель; 2 — муфта; 3 — колесо
3.2 Подбор ходовых колёс Подбор ходовых колёс производится по трём параметрам: максимальной нагрузке на колёса, скорости передвижения и режиму работы механизма. Максимальную нагрузку на колёса тележки следует определять с учётом коэффициента неравномерности нагружения колёс, равным 1.1;.
Максимальную статическую нагрузку на одно колесо определяем по формуле:
(60)
Где — вес номинального груза, Н;
— вес тележки, Н.
Вес груза определяем по формуле:
(61)
Где m — масс груза, кг;
g — весовая постоянная, Н/кг.
Вес тележки определим по формуле:
(62)
Гдемасса тележки, кг.
По рекомендациям принимаем крановое колесо типа К2Р ГОСТ 7173–54. Колёса оставляем без изменений.
Так как ходовые колёса тележек входят в состав сборочных единиц, называемых «колёсными установками», то по рекомендациям принимаем колёсные установки стандартные: приводную установку К2РП-320 ОСТ 24.090.09−75 исполнения 1; и не приводную установку К2РН-320 ОСТ 24.090.09−75, имеющую следующие параметры:
— диаметр колеса, мм 320
— диаметр конца вала, мм 55
— масса приводного колеса, кг 80.72
— ширина дорожки катания, мм 80
— масса неприводного колеса, кг 77.16
— форма поверхности катания коническая
— тип подшипника радиальный роликовый сферический двухрядный с симметричными роликами
3.3 Определение сопротивлений передвижению Сопротивление передвижению тележки определяется по формуле:
(63)
Где — коэффициент, учитывающий трения реборд колеса о головку рельса, =2.3,[5];
— диаметр колеса, м;
mоб — общая масса груза и тележки, кг;
— коэффициент трения качения колеса по рельсу, =0.12, [5];
F — коэффициент трения в подшипниках колёс, f=0.015, [5];
d — диаметр цапфы, м.
Общую массу определим по формуле:
mоб=mт+m (64)
где mт— масса тележки, кг;
mмасса груза, кг.
Диаметр цапфы ориентировочно определим по формуле:
(65)
Принимаем диаметр цапфы равным 0.071м.
mоб =2238+16 000=18238
3.4 Расчёт мощности и подбор гидродвигателя Определим мощность двигателя, необходимую для преодоления сопротивлений передвижению по формуле:
(66)
Где Wсопротивление перемещению тележки, Н;
Vскорость передвижения тележки, м/с;
— КПД привода, 0.8.
Определим частоту вращения вала двигателя. Учитывая, что применяем безредукторный привод; следовательно частота вращения двигателя будет равняться частоте вращения колеса определяемой по формуле:
(67)
Где Vскорость передвижения тележки, м/с;
Dк— диаметр колеса, м.
Определим крутящий момент на валу гидродвигателя:
(68)
Гдемощность двигателя, кВт;
— частота вращения вала двигателя, .
Так как для привода механизма передвижения нами принято разделённый привод, то крутящий момент приходящийся на один гидромотор определим по формуле:
(69)
Где 0,5−0,6 — коэффициент, учитывающий возможную неравномерность нагружения двигателей.
Принимаем средний крутящий момент 615 Нм. Исходя из этого определим объём рабочей камеры гидромотора по формуле (22):
По рекомендациям принимаем высокомоментный гидродвигатель типа МР… V/250- МР-250/250, имеющую следующие характеристики:
— рабочий объём, 250
— давление на выходе, МПа Номинальное 25
Максимальное 32
— номинальный перепад давлений, МПа 25
— частота вращения,
Минимальная 5
Номинальное 480
Максимальное 600
— номинальный расход, м/мин 127
— крутящий момент, Нм Номинальное 940
Страгивания 880
— номинальная полезная мощность, кВт 46
— КПД при номинальных параметрах, %
Гидромеханический 90
Полный 95
— допускаемая частота реверса, об/мин 8
— момент инерции вращающихся масс, 0.931
— масса гидромотора, кг 86
3.5 Подбор муфт Для соединения валов гидродвигателя и ходовых колёс принимаем зубчатую муфту МЗП-185 ГОСТ 5006–55 [10]; проверим муфту по крутящему моменту, который определяется по формуле (25):
Н· м Максимальный крутящий момент, передаваемый муфтой равен: 1400 Нм; выбранная муфта имеет следующие характеристики:
— максимальный крутящий момент, Н· м 1400
— диаметр соединяемых валов, не более, мм 60
— момент инерции, 0,21
— масса, кг 14,3
3.6 Определение тормозного пути Так как механизм передвижения тележки разрешено не оборудовать тормозом, необходимо узнать путь, на котором происходит остановка тележки. Этот путь определяется по формуле:
(70)
Где Vскорость перемещения, ;
jmax— максимально допустимое замедление, .
(71)
где aчисло приводных колёс;
bчисло не приводных колёс;
— коэффициент сцепления колёс с рельсом, 0.12, [5];
— коэффициент трения в подшипниках, 0.015, [5];
dдиаметр цапфы, м;
Dk— диаметр ходового колеса, м;
— коэффициент трения качения колеса по рельсу,, [5];
Pb— ветровая нагрузка.
Определим тормозной путь, считая движение при торможении равнозамедленным:
Определим время остановки по формуле:
(72)
3.7 Проверка на сцепление ходовых колёс с рельсом Если выбранный двигатель оказался слишком мощным, то в процессе пуска может произойти пробуксовывание колёс относительно рельса. Это явление нежелательно; чтобы его избежать, необходимо создать между колесом и рельсом достаточные силы сцепления.
Проверку на сцепление ходовых колёс с рельсом осуществляем по формуле
(73)
Где Ксц — расчётный коэффициент запаса сцепления;
1,2 — принятый запас сцепления;
jп — ускорение пуска.
Ускорение пуска зависит от времени пуска и при равноускоренном движении определяем его по формуле
(74)
где Vскорость подъёма груза, м/мин;
tп — время пуска, с;
Время пуска определяем по формуле
(75)
Где — средний пусковой момент, Н*М;
— момент сопротивления движению тележки без груза, Нм;
mмасса тележки, кг;
Dб— диаметр колеса, м;
nдв— частота вращения вала двигателя, ;
Uр— передаточное число редуктора;
— КПД привода;
К=1.1−1.2 — коэффициент, учитывающий инерцию вращающихся деталей механизма, исключая ротор и приводную муфту;
— суммарный момент инерции вращающихся частей на первом валу, .
Определим момент сопротивления движению тележки без груза по формуле:
(76)
В качестве среднего пускового момента принимаем момент при страгивании гидродвигателя: 880 Нм.
Определим время пуска:
Определим ускорение пуска:
Очевидно, что установленные гидродвигатели являются излишне мощными. Предлагаю ограничить момент двигателя пускорегулирующей аппаратурой.
4. Расчет механизма передвижения крана
4.1 Исходные данные и выбор схемы механизма В качестве исходных данных для расчета механизма крана принимают:
m = 16,0 т. — грузоподъемность крана;
V = 72,0 м/мин — скорость передвижения крана;
ПВ = 15% (легкий) — режим работы механизма;
L = 22,5м — пролет крана.
На реконструированном кране применена схема механизма передвижения крана с бестрансмиссионным приводом, то есть индивидуальным приводом.
По рекомендациям, данная схема является не совсем рациональной: большое количество соединительных муфт, большие габариты и масса привода; применение громоздкого и дорогостоящего редуктора; достаточно трудоемкий процесс установки и проверки сопрягаемых узлов; нерациональность схемы передачи силового потока.
Учитывая все вышеперечисленное, предлагаю ввести мотор — редукторную схему:
1. Мотор-редуктор;
2. Тормоз;
3. Соединительная муфта;
4. Ходовое колесо.
Рис 12. Кинематическая схема механизма передвижения крана.
Данная схема имеет следующие преимущества: компактность, рациональность силовой схемы, простота монтажа и выверки узлов.
4.2 Подбор ходовых колес Подбор ходовых колес производится по трем параметрам: максимальной нагрузке на колесо, скорости передвижения и режиму работы крана. В мостовых кранах, в связи с передвижением тележки с грузом вдоль моста крана, нагрузка на колеса является величиной переменной. Для определения максимальной нагрузки на колесо мостового крана помещаем тележку с грузом в одно из крайних положений:
Рисунок 13 — Схема нагружения крана Где максимальная нагрузка на колесо, Н;
— минимальная нагрузка на колесо, Н;
— вес тележки, Н;
— вес груза, Н;
— вес моста, Н;
Определим максимальную нагрузку на колесо:
? (77)
Полученная нагрузка равномерно распределена между двумя колесами. Определим нагрузку на одно колесо с учетом коэффициента неравномерности
(78)
По рекомендациям /1/ принимаем крановое колесо типа К2Р ГОСТ 3569– — 74 диаметром 500 мм. При этом рекомендуемый подкрановый рельс: КР 70 ГОСТ 4121– — 76 с выпуклой головкой.
По рекомендациям /1/ выберем колесные установки стандартные: установку приводную К2РП — 500 ОСТ24.090.09 — 75; исполнения 1 и неприводную К2РН — 500 ОСТ 24.090.09 — 75, имеющую следующие харктеристики:
— диаметр колеса, мм 500
— диаметр конца вала, мм 80
— ширина дорожки катания, мм 100
— масса приводного колеса, кг 310,73
— масса неприводного колеса, кг 295,89
— форма поверхности катания коническая
— тип подшипника радиальный роликовый сферический двухрядный с симметричными роликами.
4.3 Определение сопротивления передвижению
Сопротивление передвижению крана определяем по формуле:
(79)
где: — общая масса крана и груза, кг;
Где — масса крана, кг;
— масса груза, кг;
— коэффициент трения реборд колеса о головку рельса, Кр =1,2 /5/;
f — коэффициент трения в подшипниках колес, f = 0,02, /5/;
µ = коэффициент трения качения колеса по рельсу, µ = 0,6, /5/;
диаметр колеса, м;
d — диаметр цапфы, м;
(80)
Принимаем диаметр цапфы равным 0,125 мм;
4.4 Расчет мощности и подбор мотор — редуктора Мощность двигателя для преодоления сопротивлений передвижению определяем по формуле
(81)
где: V — скорость передвижения крана, м/с.
з — КПД привода. Ориентировочно — 0,9, /3/;
Так как привод механизма состоит из двух раздельных мотор-редукторов, то мощность каждого определяем по формуле:
(82)
Подбор мотор-редуктора производим, также по такой величине, как частота вращения выходного вала, которую определяем через частоту вращения колеса, определяемую по формуле
(83)
где — диаметр колеса, м;
V — скорость передвижения крана, м/мин;
Принимаем мотор — редуктор типа МП32 ГОСТ 21 356– — 75:
МП32 — 63, /1/, имеющего следующие характеристики:
— номинальная мощность, кВт 5,50
— номинальная частота вращения выходного вала, мин-1 45
— допустимый вращающий момент на выходном валу, Н*м 1000
— тип электродвигателя 4А112М4Р3
— частота вращения электродвигателя, мин-1 1450
— диаметр конца выходного вала, мм 55
— масса мотор — редуктор, кг 147
Очевидно, что применение мотор — редуктора вместо обычной схемы позволяет снизить вес привода почти в три раза, и тем самым снизить стоимость реконструкции.
4.5 Подбор муфты
Для соединения валов мотор — редуктора и колеса принимаем муфту упругую втулочно-пальцевую МУВП-320. Проверим муфту по крутящему моменту, по формуле:
(84)
Где К — коэффициент режима работы, К=2,25, /3/;
— крутящий момент на валу муфты, Н*М;
— максимальный крутящий момент, передаваемый муфтой, Нм 4000
— момент инерции муфты, кг· м2; 0,514
— масса, кг 13,3
4.6 Расчет тормозного момента и выбор тормоза Тормозной момент, по которому подбирается тормоз механизма передвижения, должен быть таким, чтобы обеспечить остановку крана на определенном тормозном пути.
С другой стороны, он не должен быть слишком большим, иначе в процессе торможения может произойти пробуксовывание колес относительно рельса. Поэтому максимальный тормозной момент определяется из условия достаточного сцепления ходовых колес с рельсом.
Максимально допустимое значение, при котором обеспечивается заданный запас сцепления колес с рельсом, равный 1,2; для механизмов передвижения мостовых кранов /3/, определяем по формуле (10):
Принимаем движение при торможении равнозамедленным, получим минимальное время торможения по формуле (11):
Зная время торможения, определим необходимый тормозной момент по формуле:
(85)
Где — общая масса крана, кг;
— диаметр ходового колеса, м;
— частота вращения двигателя, мин-1 ;
— передаточное число редуктора;
з — КПД привода;
(?J)I — суммарный момент инерции;
(?J)I = (86)
Где момент инерции ротора, кг*м2 ;0,040. /10/;
— момент инерции муфты и тормозного шкива: 0,095 кг*м2, /3/;
(?J)I = 0,040+0,095=0,135 ;
Определим диаметр тормозного шкива по формуле (28):
По рекомендациям /1/ принимаем тормозной шкив диаметром 200 мм исполнения II ОСТ24.290.06−75; имеющий следующие характеристики:
— диаметр тормозного шкива, мм 200
— ширина тормозного шкива, мм 95
— диаметр вала, мм 42
— масса, кг 9,2
По определенному тормозному моменту принимаем тормоз ТКГ — 200, имеющего следующие характеристики /11/:
— номинальный тормозной момент, Н*М 250
— диаметр тормозного шкива, мм 200
— ход толкателя, мм 32
— отход колодки, мм 1,0
— тип толкателя, ТГМ-25
— масса, кг 37,6
4.7 Проверка на сцепление ходовых колес с рельсом Проверку на сцепление ходовых колес с рельсом осуществляем по условию (3.13); ускорение пуска определяем по формуле (3.14); для этого по формуле (3.15) определим время пуска; по формуле (3.16) определим момент сопротивления движению крана без груза:
Определим средний пусковой момент по формуле
(87)
Где — номинальный момент двигателя, Нм;
Определим номинальный момент по формуле:
(88)
Где — мощность двигателя, кВт;
— частота вращения вала двигателя, мин —1 ;
Условие Ксц?1,2 выполняется, пробуксовка ведущих колес крана исключена.
4.8 Проверка электродвигателя по условию пуска Полученное значение времени пуска может удовлетворять условию сцепления ходовых колес с рельсом, но не удовлетворять условию пуска электродвигателя.
Осуществим проверку двигателя по условию пуска, которое записывается:
(89)
Где [f] - допустимый коэффициент перегрузки,
[f] = 2,0; /10/;
— пусковой момент двигателя, Нм.
(90)
1,409<2
Условие f < [f] выполняется. По условию пуска электродвигатель подходит.
5. Прочностные расчеты механизмов
5.1 Расчет механизма подъема груза на прочность
5.1.1 Расчет вала барабана на прочность
Для расчета вала барабана на прочность нам необходимы следующие исходные данные:
Р = = 20 609 Н — нагрузка на вал;
а = 180 мм=0,18 м;
b = 70мм=0,07 м;
с = 1430 мм = 1,43 м;
d = 70 мм = 0,07 м.
Рисунок 14. Схема нагружение вала.
Все размеры нами назначены конструктивно (из аналогов). Составляем расчетную схему:
Определим реакцию опоры «А»:
?м (Fyi)B = 0;
RА (b+c+d)-P1(c+d) — d = 0; (91)
RА = (0,07+1,43+0,7) — 20609(1,43+0,7) — 20 609*0,7 = 0;
1,57 RА -30 913,5−1442,63=0
1,57 RА 32 356,13
RА =20 609Н.
Реакция опоры «В» будет равна:
RВ = 20 609Н Проверка: ?yi = 0;
RА — Р1 — Р2 = 0; (92)
20 609−20 609−20 609+20609=0
Реакции опор определены верно.
Определим изгибающие моменты:
МI = 0
МII= RА * X II==1442.63 Нм М4 = RВ * x 4= =1442,63 Нм Строим эпюру изгибающих моментов.
Строим эпюру крутящих моментов:
= 8000Н*М;
По картинкам эпюр видно, что наиболее нагруженное сечение вала расположено вблизи опоры «А» под ступицей барабана, где максимальны крутящий и изгибающий моменты. Необходимо определить в этом месте требуемый диаметр, который находим по формуле:
; (93)
Где — приведенный момент, Н*м;
и — допустимое напряжение изгиба, и = 65/75 МПа /3/;
Приведенный момент определим по формуле:
; (94)
Где — изгибающий момент, Нм;
— крутящий момент, Нм;
— коэффициент приведения, = 0,75, /3/.
Полученное значение в соответствии с требованиями ГОСТа 6636 — 69 округляем до ближайшего значения из ряда диаметров: dтр — = 100 мм. Это максимальный диаметр, исходя из этого назначаем другие диаметры, которые должны быть меньше.
5.1.2 Уточненный расчет вала барабана Уточненный расчет вала барабана выполняется как проверочный для определения расчетного коэффициента запаса прочности в опасном сечении вала.
В качестве опасных примем следующие сечения: под первой ступицей барабана (сечение ослаблено шпоночным пазом); переход из одного диаметра к другому (конденсатор напряжения — галтель); необходимо определить общий коэффициент запаса прочности. Его определяют по формуле:
(95)
где — коэффициент запаса прочности по нормальным напряжениям;
— коэффициент запаса прочности по касательным напряжениям.
Коэффициент запаса прочности по нормальным напряжениям определяем по формуле:
(96)
где —1 — предел выносливости материала вала при симметричных циклах изгиба, МПа;
— коэффициент концентрации напряжений при изгибе;
— коэффициент, учитывающий влияние шероховатости поверхности, = 0,9/1,0, /10/;
— масштабный фактор для нормальных напряжений, = 0,70 /10/;
— амплитуда циклов нормальных напряжений;
— коэффициент для стали, 0,10 /10/;
— среднее напряжение нормальных напряжений;
Принимают:
для углеродистых сталей
-1 = = 266,6МПа (97)
где: — предел прочности, МПа, в = 620 МПа /14/;
=; (98)
(99)
где: — изгибающий момент, Н*м;
— осевая сила, действующая на вал, Н;
d — диаметр сечения, мм;
W — момент сопротивления изгибу;
W = d3 / 32; (100)
Получаем:
W = = 98,17 см3
= 1469,5 Н/см2 = 14,7 МПа По формуле (5.6) определим:
Коэффициент запаса прочности по касательным напряжениям определим по формуле:
; (101)
Где — предел выносливости материала вала при симметричных циклах кручении К — эффективные коэффициенты концентрации напряжений при кручении;
— масштабный фактор касательных напряжений;
; (102)
Где Т — крутящий момент, м;
— момент сопротивления кручению;
= d3 /16 (103)
Итак, для сечения со шпоночной канавкой общий коэффициент запаса прочности равен:
Для обеспечения прочности вала необходимо, чтобы коэффициент запаса прочности был не менее 1,7. Очевидно, что прочность вала в этом сечении обеспечена.
Определим коэффициент прочности для участка вала с гаптелью.
По формуле (5.6) определим коэффициент запаса прочности по нормальным напряжениям:
По формуле (4.11) определим коэффициент запаса прочности по касательным напряжениям:
По формуле (5) определим общий коэффициент запаса прочности:
Очевидно, что и в этом случае прочность вала будет обеспечена.
5.1.3 Подбор подшипника Подшипник подбираем по основным критериям работоспособности — динамическая грузоподъемность, статическая грузоподъемность и долговечность. Для возможности компенсации неточности установка корпусов подшипников, а также прогиба вала, принимаем радиальный сферический двухрядный шарикоподшипник (самоустанавливающийся) ГОСТ 5720–75 № 1320, средней серии, имеющего следующие характеристики:
— диаметр вала, мм 100
— наружный диаметр подшипника, мм 215
— ширина, мм 47
— динамическая грузоподъемность, кН 143,0
— статическая грузоподъемность, кН 72,0
Номинальную долговечность определяем по формуле:
; (104)
где n — частота вращения, мин —1;
С — статическая грузоподъемность, Н;
р — показатель степени, р = 3, /10/;
L — номинальная долговечность, час;
Р — эквивалентная нагрузка, Н;
; (105)
где: — максимальная реакция опоры, Н;
V — коэффициент вращения, V = 1, /10/;
коэффициент неравномерности нагрузок,
= 1,2, /10/;
— температурный коэффициент, К7 = 1,05, /10/;
Р= = Н;
Очевидно, что долговечность подшипника излишняя. Рекомендуется заменить подшипник легкой серии, имеющий следующие характеристики:
— диаметр вала, мм 100
— наружный диаметр подшипника, мм 180
— ширина, мм 34
— динамическая грузоподъемность, кН 68,9
— статическая грузоподъемность, кН 40,5
Выбранный нами подшипник имеет долговечность равную:
5.1.4. Расчет барабана на прочность Проектным расчетом барабана на прочность является расчет его стенки на сжатие. Найденную по формуле (1.20) толщину стенки — равную восемнадцати миллиметрам — проверим на изгиб и кручение.
Проверим стенку на сжатие по формуле:
; (106)
где: — напряжение сжатия, МПа;
— максимальное натяжение каната, Н;
t — шаг нагрузки, мм;
б — толщина стенки, мм
— допустимое напряжение сжатия, cж = 280 МПа, /14/;
71,560 280
Условие сжатия выполняется.
Проверка стенки барабана на изгиб и кручение ведется по условию:
; (107)
где: — приведенный момент в расчетном сечении барабана, Н*м;
W — момент сопротивления сечения, см3;
— допускаемое суммарное напряжение, Мпа;
; (108)
где: — наружный диаметр барабана, см;
— внутренний диаметр барабана, см;
; (109)
где: б — толщина стенки, см;
= 35,2 МПа = 150 МПа;
Условие выполняется. Барабан прочный.
6. Разработка гидропривода мостового крана
6.1 Исходные данные и выбор схемы
Для расчета гидропривода необходимы следующие данные об исполнительных двигателях:
гидроцилиндр тормоза механизма подъема:
— усилие на штоке, Н 21 380
— скорость перемещения штока, м/с 0,5
— рабочее давление, МПа 25,0
— ход штока, мм 25,0
гидромотор механизма подъема груза:
— крутящий момент на валу, Нм 9000
— частота вращения вала, мин-1 6
— рабочее давление, МПа 25,0
гидромоторы механизма передвижения тележки (два):
— крутящий момент на валу, Нм 615
— частота вращения вала, мин-1 37,8
— рабочее давление, МПа 25,0
Минимальная температура окружающего воздуха — tmin = 160 С; рабочая температура масла — tраб = 500 С. Циркуляцию рабочей жидкости принимаем по комбинированной (полузамкнутой) схема: гидромоторы механизма в передвижения тележки и подъема груза работают по замкнутой схеме циркуляции — реверс двигателей отрабатывается золотниками, — а гидроцилиндр размыкания — по незамкнутой. При этом насос питания гидроцилиндра является подпиточным для насоса замкнутого контура.
6.2 Выбор рабочей жидкости Согласно рекомендациям /8/ и инструкциям по эксплуатации гидромоторов (типа МР и МРV…/250), гидроцилиндра, управляющей и вспомогательной аппаратуры, в качестве рабочей жидкости принимаем гидравлическое масло МГ — 30, ТУ 38 — 10 150−79, имеющее следующие характеристики:
— плотность, кг/м3 890
— вязкость при температуре 00С, сСм 775
— вязкость при температуре 500С, сСм 30
— вязкость при рабочей температуре, сСм 30
6.3 Расчет исполнительных двигателей
6.3.1 Расчет гидроцилиндра тормоза механизма подъема Основные параметры гидроцилиндра были определены ранее (см. п. 2.8.1.):
— диаметр гидроцилиндра, мм 112
— диаметр поршня, мм 90
— диаметр штока, мм 45
— максимальный ход поршня, мм 25
Определим мощность поршня по формуле:
(110)
Где d — диаметр поршня, м;
Определим расход на питание гидроцилиндра по формуле:
(111)
где V — скорость перемещения поршня, м/с;
А1 -площадь поршня, м2
6.3.2 Расчет гидромотора механизма подъема Основные параметры гидромотора были определены ранее (см. п. 2.5):
— рабочий объем, см 3 2780
— давление нагнетания, МПа
Номинальное 25,0
Пиковое 32,0
минимальное 0,15
— частота вращения, мин-1
Номинальная 60
максимальная 170
минимальная 1
— крутящий момент, Нм Номинальный 8370
Страгивания 7550
— эффективная мощность, кВт 51,46
— КПД полный 0,85
— масса, кг 320
Определяем расход и давление на питание гидромотора. Расход на питание определяем по формуле:
(112)
где — номинальный расход, дм3/мин, Qн = 176 дм3/мин, /8/;
— угловая скорость, с-1;
— номинальная угловая скорость, с-1;
(113)
где — номинальная частота вращения, мин-1
(114)
где n — рабочая частота вращения вала гидромотора мин-1;
Давление на питание гидромотора определяем по формуле:
(115)
Где — номинальное давление на валу, МПа;
Т — крутящий момент на валу, Нм;
— номинальный крутящий момент, Нм;
6.3.4 Расчет гидромоторов механизма передвижения тележки Основные параметры гидромоторов были определены ранее (см. п. 3.4):
— рабочий объем, см3 250
— давление на входе, МПа
номинальное 25,0
максимальное 32,0
— частота вращения, мин —1
минимальная 5
номинальная 480
максимальная 600
— номинальный расход, л/мин 127
— крутящий момент, Нм номинальный 940
страгивания 880
— номинальная полезная мощность, кВт 46
— полный КПД, % 95
— масса, кг 86
Определим расход и давление на питание гидромоторов по формуле:
(116)
где — номинальный расход, дм3/мин;
— угловая скорость, с-1;
— номинальная угловая скорость, с-1;
Угловую скорость определим по формуле (6.5):
Номинальную угловую скорость определим по формуле (4):
Давление на питание гидромоторов определим по формуле (4.6):
6.4 Расчет диаметров трубопроводов Определим диаметры трубопроводов гидросистемы, при этом необходимо учитывать, что скорость потока должна быть не более:
— в напорной линии, м/с 4,5
— в сливной линии, м/с 2,0
— во всасывающей линии, м/с 1,6
6.4.1 Определение диаметров трубопроводов Диаметры трубопроводов определяем по формуле:
(117)
где — диаметр трубопровода, м;
— расход в трубопроводе, м3/с;
— максимально допустимая скорость в трубопроводе, м/с;
Определим диаметр напорного трубопровода:
Определим диаметр сливного трубопровода:
Определим диаметр всасывающего трубопровод:
Определим толщину стенки по формуле:
(118)
где Р1 — давление в напорном трубопроводе, НПа;
— допустимые напряжения, для стали 20 = 140 МПа;
d1 — диаметр напорного трубопровода, мм;
С учетом возможных гидроударов и необходимости нарезания резьбы принимаем толщину стенки равной ѕ мм. Для гидроприводов машин трубопроводы в основном изготавливают из стальных бесшовных холоднодеформированных труб (ГОСТ 8734−75). С учетом этой рекомендации, выбираем стальные трубы /7/, имеющие следующие характеристики:
— напорный трубопровод, мм 35×4,0
— сливной трубопровод, мм 49×4,0
— всасывающий трубопровод, мм 53×4,0
6.4.2 Определение длины гидролиний Согласно рекомендациям, при проектировании гидролиний, следует выдерживать следующую протяженность гидролиний:
— от гидробака до распределителя, м 0,8−1,2
— от распределителя до рабочего органа, м 2,0−5,0
— от рабочего органа до распределителя, м 2,0−5,0
— от распределителя до бака, м 1,0−1,2
С учетом габараитных размеров крановой тележки и возможной неточности расчетов принимаем следующие размеры:
— от гидробака до распределителя, м 1,0
— от распределителя до рабочего органа, м 2,5
— от рабочего органа до распределителя, м 2,5
от распределителя до гидробака, м 1,0
6.4.3 Определение диаметров трубопроводов на питание гидромоторов Определим диаметр напорного трубопровода на питание гидромотора механизма подъема груза по формуле (4.9):
Определим диаметр напорного трубопровода на питание гидромоторов механизма передвижения тележки по формуле (4.8):
Определим диаметр сливного трубопровода на питание гидромотора механизма подъема по формуле (6.8):
Определим диаметр сливного трубопровода на питание гидромоторов механизма передвижения тележки:
Определим толщину стенки по формуле (6.9) для линии питания гидромотора подъема:
С учетом возможных гидроударов и необходимости нарезания резьбы принимаем толщину стенки равной 3,0 мм. Согласно ГОСТу 8734−75 принимаем: для напорного трубопровода механизма подъема — стальную бесшовную холоднодеформированную трубу 20Ч3,0; для сливного — 28Ч3,0; для напорного трубопровода механизма передвижения принимаем трубу 160; для сливного — труба 20Ч3,0 (ГОСТ 8734−75).
6.5 Выбор распределителей и регулирующей аппаратуры
6.5.1 Выбор гидрораспределителей По /8/ принимаем гидрораспределитель секционный, типа РС: РС 25.16−20−06−10.2−05.03−30 (ОСТ 22−829−74), имеющий следующие характеристики:
условный проход, мм 16
— расход рабочей жидкости, л/мин номинальный 50
максимальный 65−240
— давление на входе, МПа рабочее 20,0
пиковое 32,0
— максимальные утечки из рабочих полостей, см3/мин 50
— утечки через обратные клапаны, см3/мин 10
— потери давления, МПа 0,32
— масса, кг 34,6
6.5.2 Выбор предохранительного клапана Выбираем предохранительный клапан по рекомендациям /2/, — клапан ПГД54−25, имеющий следующие характеристики:
— давление настройки, МПа 1/25
— расход рабочей жидкости, дм3/мин номинальный 160
максимальный 250
минимальный 5
— потери давления, не более, МПа 0,6
— суммарные внутренние утечки, см3/мин 90
— условный проход, мм 32
— масса, кг 6,7
Условное обозначение:
6.5.3 Выбор блока переливных и подпиточных клапанов По рекомендациям /8/ принимаем блок переливных и подпиточных клапанов типа 63 500, имеющий следующие характеристики:
— условный проход, мм 16
— номинальный расход, л/мин 40
— давление настройки, МПа максимальное 32
минимальное 5
— суммарные внутренние утечки, см3/мин 150
— потери давления, МПа 0,038
— масса, кг 8,7
Условное обозначение:
Рисунок 16 — Условное обозначение блока переливных и подпиточных клапанов
6.5.4 Выбор тормозного клапана По рекомендациям /8/ принимаем тормозной клапан типа 63−63 100, имеющий следующие характеристики:
— условный проход, мм 16
— номинальный расход рабочей жидкости, л/мин 50
— давление настройки, МПа минимальное 1
максимальное 20
— потери давления, МПа 0,3
— масса, кг 12,5
Условное обозначение:
Рисунок 17 — Условное обозначение тормозного клапана.
6.5.5 Выбор делителей потока По рекомендациям /8/ принимаем делители потока типа КД — КАС12/220, имеющие следующие характеристики:
— условный проход, мм 12
— диапазон расходов (на входе в клапан), л/мин
при настройке:
первой 16/25
второй 10/16
третьей 4/10
— способ присоединения стыковое
— потери давления, МПа 1,0
— масса, кг6,3
Условное обозначение:
Рисунок 18 — Условное обозначение делителей потока
6.5.6 Выбор обратных клапанов По рекомендациям /8/ принимаем клапан обратный Г51−21, имеющий следующие характеристики:
— условный проход, мм 8
— номинальный расход, л/мин 8
— потери давления, МПа, не более 0,28
— утечки масла, см3/мин 0,08
— масса, кг1,2
Условное обозначение:
Рисунок 19 — Условное обозначение обратного клапана
6.5.7 Выбор регулятора потока По рекомендациям /12/ принимаем регулятор потока ЭПГ55−24 с электроуправлением, имеющий следующие характеристики:
— диаметр условного прохода, мм 20
— расход масла, л/мин:
Максимальный 80
Минимальный 0,12
— давление рабочее, МПа 20
— перепад давления в дроселе, МПа, 2
— расход масла через полностью закрытый
дроссель при максимальном давлении, см3/мин 3/120
— масса, кг 7,5
Условное обозначение Рисунок 20 — Условное обозначение регулятора потока
6.5.8 Выбор гидроаккумулятора По рекомендациям /8/ принимаем пневногидроаккумулятора типа АР — АРФ — 16/320, имеющий следующие характеристики:
— вместимость, дм3 16,0
— номинальное давление, МПа 16,0
— высота, м 40
— диаметр, м 220
— размер основания, мм 228Ч228
— масса, кг 88,9
Условное обозначение:
Рисунок 21 — Условное обозначение аккумулятора.
6.6 Выбор вспомогательной аппаратуры
6.6.1 Выбор фильтра Согласно инструкциям по эксплуатации гидроаппаратов очистные устройства должны обеспечивать тонкость фильтрации не выше 25 микрон. Для чего, по рекомендациям [12], принимаем фильтр типа ФС-ФС200−25, имеющий следующие характеристики:
— условный проход, мм 32
— номинальную тонкость фильтрации, мкм 25
— номинальная пропускная способность, л/мин 200
— перепад давлений, МПа:
Номинальный 0.1
Максимальный 0.3
— рабочее давление, МПа 0.63
— масса, кг 4.5
Условное обозначение:
Рисунок 22 — Условное обозначение фильтра
6.6.2 Выбор манометра Манометр выбираем в соответствии с ГОСТом 8625−77, имеющий следующие характеристики:
— предел измерений, МПа 0−25
— диаметр корпуса, мм 100
— класс точности 1
Условное обозначение:
Рисунок 23 — Условное обозначение манометра.
6.7 Расчёт потерь давления в гидролинии Определим параметры напорной гидролинии: d1=27мм
(119)
где — длина напорной гидролинии, м;
l11— расстояние от бака до распределителя, м;
l12— расстояние от распределителя до рабочего органа, м.
Определим параметры сливной гидролинии: d1=42мм
(120)
где — длина сливной гидролинии, м;
l21— расстояние от распределителя до бака, м;
l22— расстояние от рабочего органа до распределителя, м.
Определим местные гидравлические сопротивления:
— определим сопротивление регулятора потока по формуле:
(121)
где — диаметр условного прохода, м;
— падение давления, Па;
— номинальный расход, ;
— плотность рабочей жидкости, ;
— определим сопротивление гидрораспределителя по формуле (6,12):
— определим сопротивление фильтра по формуле (6,12):
— определим сопротивление блока переливных и подпиточных клапанов по формуле (6.12):
— определим сопротивление тормозного клапана по формуле (6,12):
— определим сопротивление делителей потока по формуле (6,12):
— определим сопротивление обратного клапана по формуле (6,12):
Все выше полученные значения местных сопротивлений заносим в таблицу. Кроме этого, анализируя принципиальную схему машины вносим и остальные сопротивления потоку, такие как: колено, тройник и так далее.
Таблица 6.1 — Значения местных сопротивлений.
Вид местного сопротивления | Напорная линия | Сливная линия | ||||
Количество | Количество | |||||
Гидрораспределитель | 61,522 | 61,522 | 61,522 | |||
Регулятор потока | 93,875 | 93,875 | ||||
Блок клапанов | 7,306 | 7,306 | 7,306 | |||
Клапан тормозной | 57,677 | 57,677 | ||||
Делитель потока | 365,325 | 365,325 | ||||
Обратный клапан | 80,824 | 80,824 | ||||
Тройник | 20,206 | |||||
Колено | ||||||
Вход жидкости в ёмкость | ||||||
Выход жидкости из ёмкости | ||||||
Фильтр | 22,98 | 22,98 | ||||
629,852 | 338,445 | |||||
Определим скорости потоков жидкости в трубопроводе по формуле:
— в напорном трубопроводе:
(122)
где: — номинальная подача, ;
— диаметр напорного трубопровода, м.
Скорость потока на питание механизма подъёма груза:
Скорость потока на питание механизма передвижения тележки:
— в сливном трубопроводе:
на питание гидромотора механизма подъёма:
6.7.1 Расчёт потерь давления при температуре tmin=+C
При температуре tmin=+C гидравлическое масло МГ-30 имеет вязкость, равную 225 сСт.
Определим потери в напорной гидролинии по формуле:
(123)
(124)
где: — число Рейнольдса:
(125)
где: — вязкость масла при температуре +C;
Так как число Рейнольдса значительно меньше критического (527,16<<2320), то режим движения жидкости в трубопроводе ламинарный.
Определим потери в сливной гидролинии по формуле:
(126)
(127)
(128)
Число Рейнольдса меньше критического. Поток ламинарный.
Определим потери давления в гидролиниях питания мотора механизма подъёма по формуле (6,15). Число Рейнольдса определим по формуле (6,17):
Режим потока ламинарный.
Режим потока ламинарный.
Определим потери давления в гидролиниях питания моторов тележки:
Режим потока ламинарный.
Режим потока ламинарный.
Определим потери давления в гидролиниях питания гидроцилиндра:
Режим потока ламинарный.
6.7.2 Расчёт потерь давления при рабочей температуре При рабочей температуре (tраб=) рабочая жидкость имеет вязкость равную 30 сСт.
Число Рейнольдса:
Режим потока ламинарный.
Потери давления в сливной гидролинии:
Режим потока ламинарный.
Определим потери давления в гидролиниях питания гидромоторов передвижения тележки:
Режим потока ламинарный.
Определим потери давления в гидролиниях питания гидроцилиндра:
Поток турбулентный.
Поток турбулентный.
6.8 Расчёт и выбор насоса Требование по давлению на питание цилиндра:
(129)
где: Р1— давление на питание цилиндра, МПа;
— потери давления на питание гидроцилиндра, МПа.
(130)
где: А1— площадь поршня, ;
Fусилия на штоке, Н.
Требуемая подача насоса:
(131)
где: Q1— требуемая подача на питание гидроцилиндра, л/мин;
— объёмный КПД.
В качестве насоса подпитки основного контура и насоса питания гидроцилиндра тормоза принимаем насос пластинчатый нерегулируемый — 5Г12−26АМ, имеющий следующие характеристики:
— рабочий объём, 224
— подача, не менее, л/мин 200
— давление на выходе из насоса, МПа номинальное 6,3
предельное 7
— номинальная мощность, кВт 24,5
— частота вращения,
Минимальное 600
Номинальное 960
Максимальное 960
— давление на входе в насос, МПа
Согласно рекомендациям в качестве насоса основного контура принимаем нерегулируемый аксиально-поршневой насос типа НА-НА-40/200; имеющий следующие характеристики:
— рабочий объём, 40
— давление на выходе, МПа Минимальное 32
Номинальное 40
Максимальное 1
— давление на входе, МПа Минимальное 1,6
Максимальное 0,07
— номинальная частота вращения, 1920
— номинальная подача, л/мин 56,5
— номинальная мощность, кВт 21,1
— масса, кг 62
В качестве приводных двигателей принимаем асинхронные электродвигатели, имеющие следующие характеристики:
— электродвигатель подпитки насоса, тип А-72−2 М30
— частота вращения, 960
— номинальная мощность, кВт 17
— электродвигатель основного насоса, тип АЛ-61 М10
— частота вращения, 2920
— номинальная мощность, кВт 22
6.9 Расчёт режимов работы
6.9.1 Расчёт гидравлической характеристики трубопровода Определим требуемый напор по формуле:
(132)
где:
(133)
(134)
Полезное давление определим по формуле:
(135)
Требуемое давление определяем по формуле:
(136)
7. Расчет металлоконструкции крана Определение нагрузок Тележка в середине пролета Определим расчетный вес главной балки по формуле:
; (137)
Где — нормативный вес главной балки, кН;
К — коэффициент перегрузки, К=1,1, /15/;
При этом весе интенсивность распределенной нагрузки определим по формуле
(138)
где: L — пролет, м;
Определим расчетную нагрузку от силы тяжести груза:
; (139)
где Q — сила тяжести груза, соответствующая номинальной грузоподъемности крана, Н;
— коэффициент нагрузки силы тяжести груза, = 1,05, /16/;
Определим расчетный вес тележки по формуле:
; (140)
где — вес тележки нормативный, кН;
К = 1,05 — коэффициент перегрузки /15/;
Расчетный вес концевой балки определим по формуле:
(141)
где — вес концевой балки нормативный, кН;
= 1,1 — коэффициент перегрузки, /16/;
Расчетный вес привода определяем по формуле:
(142)
где — вес привода, кН;
= 1,2 — коэффициент перегрузки, /16/;
Расчетную вертикальную динамическую нагрузку при работе механизма подъема определим по формуле:
(143)
где: — коэффициент динамичности, ѓв = 0,10, /15/;
Определим расчетную динамическую нагрузку при работе механизма передвижения по формуле:
(144)
где: а — ускорение крана с грузом, м/с2;
mм — масса моста, кг;
в = 0,2 — коэффициент, учитывающий влияние колебаний;
Q — грузоподъемность, кг;
Тележка расположена у концевой балки В этом случае на неметаллоконструкцию действуют следующие нагрузки: расчетный вес главной балки; расчетный вес груза; расчетный вес тележки; расчетный вес концевой балки; динамическая нагрузка при заклинивании ходовых колес крана, которая определяется по формуле;
; (145)
где k = 1,15 — коэффициент перегрузки;
— нормативная динамическая нагрузка, кН;
; (146)
где = 0,2 — коэффициент сцепления приводного колеса с рельсом, /15/;
— давление на приводные колеса концевой балки крана, около которой находится тележка;
где: — расчетный вес кабины, Н;
Кроме этого определим реакцию наиболее нагруженной опоры — тележка находится возле концевой балки:
Рисунок 24. Схема нагружения главной балки Определим реакцию :
; (147)
; (148)
Р = 0,25 (37+164,81+16,48) = 54,57 кН;
Максимальный изгибающий момент определяем по формуле:
; (149)
где: L — пролет, м;
Изгибающий момент от веса главной балки определяем по формуле:
; (150)
Наибольший суммарный изгибающий момент в вертикальной плоскости:
; (151)
Поперечную силу в вертикальной плоскости определяем по формуле:
; (152)
где: — расчетная поперечная сила;
— поперечная сила от веса балки;
; (153)
По рекомендациям /16/ уточним изгибающий максимальный момент, действующий на балку:
Проведем расчет балки в горизонтальной плоскости.
Изгибающий момент определяем по формуле:
; (154)
где: — изгибающий момент в крайнем сечении концевой балки при абсолютно жесткой заделке;
— момент инерции при изгибе в горизонтальной плоскости сечения главной балки;
— момент инерции при изгибе концевой балки;
— колея тележки, м;
; (155)
; (156)
Определим крутящий момент, действующий на главную балку. Его величину определяем по формуле:
; (157)
где: Н — высота балки, м;
— высота рельса, м;
Определим момент инерции сечения главной балки:
Определим момент инерции концевой балки:
По формуле (6.20) определим изгибающий момент По формуле (6.22) определим крутящий момент:
Прочность балки проверяем по методу предельных состояний, а именно по первому предельному состоянию: потеря несущей способности при однократном действии максимальной нагрузки. Прочность балки оцениваем о эквивалентному напряжению, определяемому по гипотезе удельной энергии формоизменения, которая выглядит так:
; (158)
где: д — нормальные расчетные напряжения, МПа;
ф — касательные расчетные напряжения, МПа;
— расчетное сопротивление стали на растяжении, МПа; Rр = 240 МПа, /16/;
m0 — коэффициент условной работы;
; (159)
; (160)
где: — сопротивление стали на срез, МПа;
;
где: m1 — коэффициент отказа, m1 = 0,9, /16/;
m2 — коэффициент повреждений, m2 = 1,2, /16/;
m3 — коэффициент несовершенства расчета, m3 = 0,9, /15/;
m0 = 0,9+1,2+0,9 = 0,972
Расчетное сопротивление срезу определяем по формуле:
; (161)
Определим нормальные напряжения в точке примыкания стенки к поясу по формуле:
; (162)
где: — изгибающие моменты соответственно, относительно осей сечения x и y; Нм
— момент инерции при изгибе, см4;
; (163)
Определим касательные напряжения по формуле:
; (164)
где: — статический момент полусечений, см3;
; (165)
; (166)
; (167)
Определим выполняется ли условия (7.25) и (7.26):
[д] =
233,28 > 179,9 МПа;
Условие выполняется.
[ф] =
135,1 > 123,0
Условие выполняется.
Оценим прочность по гипотезе удельной энергии формоизменения:
[д]
д Очевидно, что д < [д], то есть условие выполняется.
Кроме этого определим нормальное напряжение для угловых точек сечения по состоянию:
; (168)
где: — номер сопротивления сечения при изгибе относительно оси сечения Х, см3;
— момент сопротивления сечения относительно оси У.
; (169)
; (170)
; (171)
; (172)
Проверим по условию (6.24):
Условие выполняется.
Также проверим прочность угловых поясных швов. Усилие сдвига определим по формуле:
; (173)
где: Q — расчетная поперечная сила, кН;
— статический момент инерции поясного листа, см4;
; (174)
где: Н — высота балки, см;
Определим напряжение (касательное) в угловых швах:
; (175)
где: К — катет шва, см;
в — коэффициент, учитывающий технологию сварки, в = 1, /16/;
; (176)
Очевидно, что и в данном случае напряжения значительно меньше допускаемых: [ф] = 180 МПа;
Проверка статической жесткости моста Статическая жесткость моста характеризуется прогибом главных балок. Прогиб главных балок мостов при действии статической подвижной нагрузки в расчетном случае, когда тележка находится в середине пролета не должна превышать установленных величин: L / 500; /16/.
Прогиб определяется по формуле:
; (177)
где: Е — модуль упругости. Для стали Е = МПа /17/
Определим допускаемый, из условия, прогиб:
Очевидно, что мост обладает необходимой статической жесткостью и усиление конструкции в этом случае не требуется.
Проверка динамической жесткости моста динамическая жесткость моста характеризуется временем затухания колебаний.
Время затухания определяем по формуле:
; (178)
где: ф — период свободных колебаний;
г — логарифмический декремент колебаний;
; (179)
где: ф — касательные напряжения, МПа;
; (180)
где: с — жесткость конструкции, кН/м;
m — приведенная масса и грузовой тележки, кг;
(181)
где: Q — нагрузка, Н;
— прогиб, м;
Очевидно, что условию динамической жесткости мост крана удовлетворяет.
8. Электрическая часть В электрической части дипломного проекта рассматривается принципиальная схема мостового крана. В связи с модернизацией и установкой гидропривода в схему внесены следующие изменения: установлены гидротолкатели и гидропровод.
На схеме (чертеж КМ -16.08.00.000) схематично изображены следующие узлы: «Пр» — плавкие предохранители; «Лп» — лампы сигнализации; «М1», «М2» — электродвигатели механизма передвижения крана; «М3» — электродвигатель моста подпитки; «М4» — электродвигатель моста основного контура; «Мг» — электродвигатель гидротолкателя; «РТ» — тепловое реле; «Гр» — гидрораспределитель; «КнВ» — кнопка «Вперед»; «КнН» — кнопка «Назад»; «КнС» — кнопка «Стоп»; «КнВв» — кнопка «Вверх»; «КнВн» — кнопка «Вниз»; «КнВт» — кнопка управления тележкой «Вперед»; «КнНт» — кнопка управления тележкой «Назад»; «СД» — сельсин — датчик; «СП» — сельсин — приемник; «КнБ» — кнопка «Больше»; «КнМ» — кнопка «Меньше»; «Кв» — конечный выключатель;
Кран работает от переменного напряжения 380 В. Алгоритм управления крана и принцип действия схемы следующий; при нажатии кнопки «Вперед» («КнВ») катушка контактора «В» обтекается током. Сердечник контактора «В» втягивается., вследствие чего замыкается цепь главного тока главными контактами контактора, и двигатели начинают вращаться. Одновременно с ними вклячаются и электродвигатели гидроталкателей. После того, как кнопка «КнВ» отпущена, питание катушки поддерживается через блок — контакт контактора «В», включенный параллельно этой кнопке. В случае снятия напряжения катушка контактора не будет обтекаться током, контактор «В» разомкнет свои контакты и двигатель отключится. При восстановлении напряжения двигатель не включится до тех пор, пока не будет нажата кнопка «КнВ» ил «КнН». Остановка двигателя осуществляется нажатием кнопки «Стоп» — «КнС», вследствие чего размыкается цепь питания катушки контактора. При нагрузке двигателя эта цепь также размыкается за счет размыкания контактов тепловых реле, включенных в цепь катушек контакторов. Для предотвращения одновременного включения контакторов «В» и «Н», что привело бы к короткому замыканию в силовой цепи, в схеме предусмотрена блокировка контактов «В» и «Н». в данном случае, она осуществляется включением блок — контактов контакторов «В» и «Н» в цепи их катушек. При контакторе «В» ток в его катушку идет через замкнутый блок — контакт контактора «Н». если теперь нажать на кнопку «КнН», чтобы включить контактор «Н», то ток по катушке «Н» не пойдет, так как блок — контакт «В» в цепи его катушки разомкнут контактом «В». При перегрузке двигателей срабатывает тепловое реле «РТ» и замыкает свои контакты, которые разомкнут цепь катушки контактора.
Подобная схема управления относится и к управлению золотниками гидрораспределителей.
Для того, чтобы иметь возможность произвести регулировку расхода жидкости на кране установлен электрический регулятор потока. При это, он управляется при помощи кнопок «Больше» — «КнБ» и «Меньше» — «КнМ». Сам регулятор состоит из сельсина — датчика — «СД» и сельсина — приемника — «СП», связанными между собой синхронизирующими обмотками. При нажатии кнопок «КнБ» ил «КнМ» вращение электродвигателя реверсируется.
Кроме этого, механизм подъема груза содержит в своей цепи ограничитель высоты подъема — «КВв», который скомутирован таким образом, что при подъеме крюка в крайнее верхнее положение и срабатывании датчика происходит размыкание цепи управления гидрораспределителем, однако при этом сохраняется возможность запуска механизма на опускание груза.
Точно также работают и концевые выключатели механизмов передвижения — выключая привод, но при этом оставляя возможность запуска механизма в обратную сторону.
Защита цепи крана от токовых перегрузок осуществляется тремя плавкими предохранителями. Также, при подаче напряжения, на кране загораются сигнальные лампы — «Лп» — позволяющие визуально контролировать наличие напряжения в каждой из фаз.
Помимо всего перечисленного, следует обратить внимание на то, что при включении крана в работу, то есть подачи на него напряжения, включаются электродвигатели насосов, поскольку гидросхема спроектирована с учетом свободной циркуляции рабочей жидкости. Защита электродвигателей от перегрузок осуществляется тепловыми реле — «РТ».
9. Специальная часть Так как в дипломном проекте производится модернизация с заменой приводов (с электрического на гидравлический), то технология техобслуживания и ремонта основных узлов и агрегатов крана изменится. В проекте разработана нижеописанная технология технического обслуживания и ремонта крана с гидроприводом в условиях данного производства.
Модернизацию крана производить при помощи монтажного самоходного крана с разбором кровли, через которую и следует подавать на кран узлы и детали.
Приварку кронштейнов для крепления гидроаппаратуры следует проводить на месте, не снимая тележки с крана.
Для замены приводных колес следует поднять приводную тележку при помощи домкратов и установить на деревянные прокладки, которые следует удалить по окончании монтажа и выверки новых колесных установок.
Перед началом монтажа следует подготовить монтажную площадку, рядом с цехом, размером: 20Ч25м; для сокращения сроков модернизации в углах площадки установить прожекторы освещения так, чтобы они освещали площадку перед краном.
Оборудовать подъездные пути для автотранспорта, так как для сокращения складских расходов монтаж узлов вести «с колес».
Для монтажа оборудования использовать кран с высотой подъема не менее 17 м.
Реконструимый кран следует надежно зафиксировать от самопроизвольных перемещений; отключить от электросети; обеспечить невозможность случайного включения электроэнергии на питание крана.
При установке гидродвигателей крепление их осуществлять высокопрочными болтами с упругими шайбами, исключающими самоотвинчивание. Момент при затяжке болтов должен составлять 80−120 Н· м. Дренажный трубопровод подсоединить к верхнему из двух отверстий в корпусе.
Перед первым пуском заполнить контуры гидролинии маслом МГ-30 СТУ 38−10 150−79; залить масла в полость гидроцилиндра тормоза; в корпус гидродвигателей до уровня дренажных отверстий. Проверить наличие масла в гидробаке. Вначале запустить насос подпитки, через пять минут работы запустить насос основного контура. При этом контролировать температуру и давление рабочей жидкости по показаниям термометра и нанометров высокого и низкого давления. Во время пуска и работы необходимо следить за состоянием насосов по уровню звука. Стук внутри корпуса насоса не допускается.
Обслуживающий персонал должен иметь точные сведения о сорте масла в гидросистеме.
Категорически запрещается эксплуатация гидропривода на рабочих жидкостях не указанных в карте смазки.
При техническом обслуживании регламентируются следующие работы:
— после запуска гидропривода в эксплуатацию необходимо заменить фильтрующий элемент через 8 часов работы проверить состояние крепления агрегатов;
— через 80 часов работы провести замену рабочей жидкости. Для чего следует предварительно прогреть гидроконтуры до рабочей температуры;
После этого регламентные работы производить в соответствии с видами технического обслуживания:
Ежесменное техническое обслуживание (ЕО), проводится один раз перед началом рабочей смены:
Осмотреть кран и проверить:
Исправность и состояние тормозов, приборов безопасности, наличие ключа — марки, состояние канатов, металлоконструкций, исправность электрооборудования; следует обратить особое внимание на уровень рабочей жидкости в гидромашине; состояние мест разъемов крышек, установки пробок; соединения трубопроводов; состояние болтов, крепящих гидромашину к основанию.
Профилактический осмотр один раз в десять дней осуществляется бригадой (слесарь, электрик, машинист), под руководством лица, ответственного за исправное состояние крана. При этом особое внимание уделить на барабан и блоки, муфты, ходовые колеса, канаты, подшипники, металлоконструкции, электродвигатели, и другое электрооборудование. При осмотре барабана и блоков проверить состояние ручьев и реборд, систему смазки подшипников, надежность крепления. Проворачивание блоков на осях должно быть свободным.
При осмотре муфт проверить надежность крепления их на валах и затяжку болтов соединяющих части муфт.
При осмотре подшипников качения проверить надежность крепления их корпусов к металлоконструкции моста или рамы, плотность прилегания крышек, состояние уплотнений и наличие смазки в подшипнике. Температура подшипника при нормальной работе не должна превышать 60−70С.
При ТО металлоконструкции тщательно осмотреть: сварные соединения, соединяющие главные балки с концевыми; монтажные стыки концевых балок; крепления площадок обслуживания; места крепления букс ходовых колес; главные и концевые балки; раму грузовой тележки (катковые и поперечные балки); особое внимание обратить на наличие погнутых и лопнувших элементов, трещин в сварных швах.
При техосмотре электропроводки проверить ее целостность. Кроме того, по всему оборудованию проверяют крепление проводов клемными болтами и, одновременно, надежность заземления корпусов электрооборудования.
Замену масла в гидроприводе проводить через 3500 часов работы, но не реже, чем один раз в два года.
Замену фильтрующих элементов производить по мере загрязнения, о чем сигнализирует индикатор в крышке фильтра.
Заправку гидросистемы производить только через фильтр с тонкостью фильтрации 20 мкм.
Таблица 9.1 — Карта смазки
Смазывание детали и сборные единицы | Смазочный материал | Периодичность | Способ смазки | |
Редуктор механизма передвижения крана | Индустриальное масло И-30А ГОСТ 20 799–75 | Через 2500 часов работы | Заполнение емкости (картерная смазка) | |
Подшипники ходовых колес крана | Пластическая антифрикционная смазка ЦИАТИМ -203 (ГОСТ 8773−73) | Через 800 часов работы | Шприц — прессом, шпателем | |
Подшипники ходовых колес тележки | То же | То же | То же | |
Подшипники блоков | То же | То же | То же | |
Подшипник крюка | То же | То же | То же | |
Канат | Канатная 39У | Один раз в год | То же | |
Таблица 9.2 — Рабочая жидкость
Рабочая жидкость | ГОСТ (ТУ) | Вязкость кинематическая, ммл/с при t=50С | Температура окружающего воздуха, С | |
МГ-30 (основная) | ТУ 38−10 150−79 | От +5 до +70 | ||
Индустриальное масло И-30А (заменитель) | ГОСТ 20 799–75 | 28 — 33 | От +5 до +70 | |
Таблица 9.3. Ведомость дефектов
Вид отказа, внешнее проявление и дополнительные признаки | Вероятная причина | |
Тормоз плохо удерживает груз (сползание груза при включенном тормозе) | Сработались фрикционные накладки. Наличие масла на поверхности шкива. Недостаточный тормозной момент. | |
Тормоз не растормаживается при включении | Отсутствует подача в гидросистеме. Прорыв гидролинии. Не работает насос подпитки. Неисправен золотник. | |
Течь масла из мест соединения трубопроводов гидросистемы | Слабая затяжка накидных гаек. | |
Вспенивание масла в гидросистеме | Подсос воздуха во всасывающей линии. Недостаточное количество масла в баке. Наличие воздуха в системе. | |
Чрезмерный нагрев масла в системе (свыше 70С) | Недостаточное количество масла в баке. Засорился фильтр. Засорился сапун на маслобаке. Часто срабатывает предохранительный клапан. Повышенная интенсивность работы. | |
Неравномерное (рывками) опускание груза | Разрегулировался тормозной клапан. Наличие воздуха в гидросистеме. | |
Груз не опускается | Не работает насос. Неработает гидрораспределитель. Чрезмерно затянута пружина тормозного клапана. | |
Утечка масла между крышкой и корпусом. | Износ или повреждение уплотнительных прокладок | |
Недостаточное усилие на рабочих механизмах | Разрегулировался встроенный предохранительный клапан. Поломка пружины предохранительного клапана. Перетечка жидкости из одной полости в другую в гидроцилиндре и повышенная утечка в гидромоторах. Насосы не дают номинальной подачи. | |
Кран не поднимает груз максимально допускаемой массы | Повышение утечек в гидромоторе механизма подъема. Недостаточна плотно закрыт перепускной вентиль. | |
Течь масла по стычкам между секциями гидрораспределителя. | Недостаточно затянуты шпильки, затягивающие секции. Повреждены резиновые уплотнительные кольца. | |
Течь масла из гидрораспределителя. | Изношено резиновое уплотнительное кольцо. | |
Течь масла из — под пробок. | Слабая затяжка пробок. Повреждены резиновые уплотнительные кольца. | |
Повышенный шум в редукторах механизма передвижения. | Недостаток масла в картере редуктора. | |
Вибрация исполнительных механизмов. | Ослабла затяжка крепежный деталей. | |
Повышенный нагрев корпусов подшипников | Отсутствие смазки. Разрушение подшипников. | |
Скрежет в корпусе подшипников. | Разрушение сепаратора подшипника. | |
Нагрев редуктора и двигателя до температуры более 80С | Отсутствие, недостаток или загрязнение масла. Заклинивание тормоза. Превышение режима эксплуатации. Износ подшипника или зубьев. | |
После включения электродвигателей не вращается | Обрыв цепи статора. Перегорели плавкие вставки. Не включена цепь питания крана. | |
10. Охрана труда На фоне внедрения новой техника, которая характеризуется большой энергоемкостью, производительностью, высоким скоростями и удельной мощностью создание безопасных условий труда, обеспечивающих оптимальные санитарно — гигиенические условия и исключающие травматизм и профессиональные заболевания является высшей государственной задачей.
Эти проблемы отражены в Конституции Республики Казахстан и в существующем трудовом законодательстве регламентируются: продолжительность трудового дня; взаимоотношения между трудящимися и администрацией; охрана труда, жизни и здоровья.
Помимо конституционного и трудового закона, законодательными документами в области охраны труда являются: государственные стандарты, правила и норма, в которых содержатся конкретные требования по безопасности труда на производстве.
В нашей стране органом, следящим за правильной и безопасной эксплуатацией грузоподъемных машин, является Государственный комитет по надзору за безопасным ведением работ в промышленности и горному надзору (Госгортехнадзор РК), главными задачами которого являются: проведение контроля за выполнением установленных требований по безопасному ведению работ и проведением профилактических мер по предупреждению аварий и производственного травматизма, а также обеспечение единства требований, а также обеспечение единства требований, предусматриваемых правилами, нормами и инструкциями по технике безопасности на предприятиях, независимо от их территориального расположения и ведомственного подчинения.
Администрация предприятия устанавливает постоянный надзор за состоянием грузоподъемных устройств, канатов цепей, сменных грузоподъемных электромагнитов и т. д.), съемных грузозахватных приспособлений (стропов клещей, траверс) и тары, уход за ними и безопасностью эксплуатации.
При проектировании и эксплуатации грузоподъемных машин особое внимание следует обращать на повышение их надежности и соблюдение требований техники безопасности. Соблюдение правил Госгортехнадзора является обязательным при проектировании, расчете и эксплуатации грузоподъемных машин.
Безопасная эксплуатация грузоподъемных машин достигается при соблюдении правил технической эксплуатации, обеспечении прочности и устойчивости, наличии автоматических блокировок, исключающих возникновение аварийных ситуаций при неправильных непреднамеренных действиях обслуживающего персонала и специальных устройств, обеспечивающих их безопасную работу.
К устройствам, обеспечивающим безопасную работу грузоподъемных машин, относятся устройства концевой защиты, ограничители грузоподъемности, противоугонные устройства, буферы и упоры, ограничители перекоса кранов и другие.
В данном дипломном проекте предусмотрены следующие устройства безопасности, обеспечивающие безопасную работу крана: концевые выключатели, автоматически выключающие механизмы подъема груза, передвижения крана и передвижения тележки при подходе к крайнем положениям; буферные устройства; тормозные устройства; предохранительные клапаны и тормозной клапан гидросистемы; а также тепловые реле и магнитные контакторы электрооборудования, обеспечивающие надежную и безопасную эксплуатацию крана.
Концевые выключатели механизма передвижения устанавливают таким образом, чтобы отключение привод происходило на расстоянии до упора, равном не менее половины пути торможения механизма передвижения крана или тележки.
Ограничитель хода кранов и тележек состоял из концевого выключателя и профилированной лейки. В ограничителях хода крана концевой выключатель установлен на кране, а линейка — на основании кранового пути; в ограничителях хода тележек концевой выключатель установлен на кране (на пролетном строении), линейка — на тележке. При подходе крана к крайнему допустимому положению ролик концевого выключателя наезжаем на скошенную часть линейки, в результате чего размыкается контакт концевого выключателя и отключается механизм передвижения.
После этого движение крана или тележки возможно только в обратном направлении.
Рисунок 25. Рычажный ограничитель высоты подъёма.
Устройство концевой защиты механизма подъема или ограничитель высоты подъема груза (рис.19) состоит из концевого выключателя 1, рычага 3 с грузом 5, удерживаемого от падения тросиком 6. Размыкающий контакт концевого выключателя находится в цепи контактора, осуществляющего включение двигателя механизма подъема, или в цепи защиты крана.
При подъеме груза до предельного верхнего уровня обойма подвески 4 поднимает рычаг с грузом, что приводит к размыканию контакта 2, отключению золотника гидрораспределителя и замыканию тормоза. Дальнейшая работа механизма возможно лишь на опускание груза.
Ограничитель высоты подъема должен быть установлен так, чтобы после остановки грузозахватного устройства без груза сохранился зазор, не менее двухсот мм между грузозахватным устройством и элементом, стоящим на пути его движения.
Для ограничения перемещения кранов и грузовых тележек по рельсовым путям, а также для смягчения ударов при столкновениях применяют буфера. При полностью исправных тормозах и концевой автоматической защите крана установка буферов позволяет расширить рабочий ход крана или тележки, а при возможной неисправности тормозов и автоматической защиты повысить надежность и безопасность крана.
Рисунок 26 — Буфер.
Типовой буфер имеет амортизатор, изготовленный из морозостойкой резины средней твердости с пределом прочности при разрыве, не менее 4,0 МПа; относительным удлинением не менее 20% и твердости (по ТИР) в пределах 50−65 ОСТ 24.191.37−78. Конструкция таких буферов показана на рис. 20. Такие буфера обладают хорошей поглощающей способностью, так как 30−50% кинетической энергии тележки переходит в теплоту благодаря силам внутреннего трения резины. Энергоемкость буфера сравнительно невелика: при деформации, составляющей 50%, 1 см³ резины может поглотить энергию 1,8 Дж.
В модернизируемом кране предусмотрены пружинно — фрикционные буфера, которые имеют очень высокий коэффициент поглощения — 0,6−0,7.
Для остановки механизмов подъема и передвижения крана в данном проекте предусмотрены колодочные тормоза, в которых роль размыкателя колодок выполняют электрогидравлические толкатели и гидроцилиндр, которые более безопасны в работе и имеют следующие преимущества: 1. электрогидравлические толкатели не чувствительны к механическим перегрузкам. Если внешняя нагрузка превышает подъемную силу, то поршень толкателя остаются на месте, а насос продолжает работать, создавая нормальное рабочее давление жидкости под поршень. При этом ток в обмотке двигателя, также напряжения в элементах толкателя не увеличиваются; 2. более главная работа привода с большим числом включений в час; 3. резкое уменьшение пусковых токов.
Замыкание тормоза механизма подъема груза осуществляется цилиндрической пружиной, встроенной внутрь гидроцилиндр. Размыкание тормоза происходит под действием давления рабочей жидкости, имтающей гидропривод механизма.
Для безопасной и надежной эксплуатации гидропривода в системе предусмотрены следующие приборы безопасности: тормозной клапан, предохранительный клапан, гидро аккумулятор, теплообменник, приборы контроля. Кроме этого система гидропривода выполнена по схеме комбинированной циркуляцией эидкости, при этом система подпитки компенсирует утечки при работе основного контура, стабилизирует температурный режим, очищает рабочую жидкость от продуктов изнашивания и окисления, исключает разрывы потока жидкости в гидролинии основного контура циркуляции, исключает кавитацию основного насоса. При выходе из строя насоса подпитки, подачу рабочей жидкости в основной контур осуществит гидроаккумулятор, имеющей объем 16 литров, что позволит крану завершить технологический процесс.
При опускании груза в гидромоторе может произойти явление разрыва потока жидкости, что сопровождается повышенным износом гидромотора, появлением стука и нарушением нормальной работы всего механизма. Для устранения этого явления применяются тормозные клапаны. Они устанавливаются от управляющего давления, обратно пропорционального нагрузке, поэтому скорость опускания груза поддерживается практически постоянной.
Для защиты гидроприводы в системе установлен предохранительный клапан, не допускающий перегрузок и срабатывающий при давлении 35,0МПа.
Для поддержания нормальной температуры рабочей жидкости в словной линии контура подпитки установлен радиатор охлаждения с принудительной циркуляцией воздуха, обдувающего ребра теплообменника.
Контроль за давлением и температурой рабочей жидкости осуществляется через манометры высокого и низкого давлений и термометра, установленных на корпусе маслонасосной установки.
Для защиты электрооборудования от перегрузок и нормальной эксплуатации крана в электросхеме предусмотрены следующие приборы безопасности: 1. тепловые реле, отключающие электродвигатели и золотники при превышении нагрузки сверх допустимой; 2. магнитные контакторы, не позволяющие самозапуск двигателей после отключения питания крана во время технологического процесса; 3. лампы сигнализации, позволяющие вести визуальный контроль о наличии напряжения в каждой фазе электропитания; 4. защита всего электрооборудования крана осуществляется при помощи плавких предохранителей, размыкающих цепь при превышении напряжения.
Обязанности оператора крана Перед пуском крана в работу.
Перед началом работы крановщик обязан произвести осмотр крана. Данный осмотр должен осуществляться только при неработающих механизмах и отключенном рубильнике питания и механизмов крана, а также электрооборудования. Особое внимание обращать на герметичность гидросистемы, подтекания масла не допустимы. Необходимо проверить уровень рабочей жидкости в баке по показаниям фонарного маслоуказателя и, при необходимости, долить. При обнаружении течи, оператор крана, не приступая к работе, должен доложить об этом лицу ответственному за исправное состояние крана.
После осмотра крана перед пуском его в работу, крановщик должен опробовать в холостом режиме все механизмы на ходу и проверить при этом исправность действия: механизмов крана и электрической аппаратуры; приборов и устройств безопасности; тормозов.
При обнаружении во время осмотра и о пребывания крана неисправностей, оператор, не приступая к работе, докладывает об этом лицу, ответственному за исправное состояние крана. Если неисправности обнаружены, машинист расписывается в вахтенном журнале и приступает к работе согласна полученному наряду.
Во время работы крана Во время работы механизмов крана машинист не должен отвлекаться, а также производить чистку, смазку и ремонт механизмов.
Прежде, чем осуществить какое — либо движение краном, оператор обязан убедиться, что в зоне работы крана нет людей.
Крюк подъемного механизма устанавливать над грузом так, чтобы при подъеме груза исключалось наклонное натяжение грузового каната.
Перемещаемые в горизонтальном направлении грузы следует предварительно приподнять на 0,5 метра выше встречающихся на пути предметов.
Внимательно следить за канатами, в случае спадания их с барабана или блоков, образования петель или обнаружения их повреждения, оператор крана обязан приостановить работу крана.
При подъеме и перемещении грузов оператору крана запрещается: допускать к обвязке или зацепки грузов случайных лиц, не имеющих прав стропальщика; поднимать или кантовать груз, вес которого превышает грузоподъемность крана; подтягивать груз по земле при наклонном натяжении канатов; отрывать крюком груз, заложенный другими грузами, укрепленный болтами или залитый бетоном; освобождать краном защемленный грузом съемные грузозахватные приспособления; поднимать груз с находящимися на нем людьми, а также груз уравновешиваемой весом людей или поддерживаемый руками; производить погрузку и разгрузку автомашин, при нахождении шофера или других людей в кабине; поднимать баллоны со сжатыми сжиженным газом, не уложенные в специальную тару; продолжать работу при недостаточном освещении места работы, а также в других случаях, когда оператор плохо различает перемещаемый груз; если закручиваются канаты полиспаста.
Если во время действия крана произошла авария или несчастный случай, оператор крана обязан немедленно поставить в известность лицо, ответственное за исправное состояние крана.
При возникновении на кране пожара машинист должен немедленно приступить к его тушению, вызвав одного из членов бригады, обслуживающую кран, пожарную команду. При пожаре прежде всего дожжен быть отключен рубильник, падающий напряжение на кран.
После прекращения работы крана По окончании работы крана оператор обязан соблюдать следующее: не оставлять груз в подвешенном состоянии; установить крюк в положении, определяемое инструкцией завода — изготовителя; остановить исполнительные двигатели, отключить рубильник, выключив электродвигатели приводов насосов; при работе крана в несколько смен, машинист, сдающий смену, должен сообщить сменщику о всех неполадках в работе крана и сдать смену, сделав в вахтенном журнале соответствующую подпись.
11. Экономическая часть В данной части дипломного проекта, проведено технико-экономическое обоснование и выполнено ряд расчетов по проведению модернизации мостового электрического крана под нужды производственного процесса, в цехе вакуумных установок ЦРПО ОАО «CCГПО», определена экономическая эффективность после проведения модернизации.
В конструкцию крана предложено произвести следующие изменения:
1. Заменить электрический привод механизма подъёма, гидравлическим.
2. Заменить электрический привод механизмов передвижения тележки, гидравлическим.
3. Привод механизма передвижения крана выполнить по блок-приводной схеме.
4. Изменение суммарной установленной мощности двигателей с 28,5 кВт до 46 кВт Таблица 11.1 — Технические характеристики мостового крана и продолжительность технологического цикла
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Грузоподъёмность | Q | т | |||
Высота подъёма | H | м | |||
Скорость подъёма груза | Vпод | м/мин | 7,5 | 7,7 | |
Скорость передвиж. тележки | Vт | м/мин | |||
Скорость передвиж. крана | Vкр | м/мин | |||
Масса крана | М | т | 15,8 | ||
Нормативный срок службы | Тсл | лет | |||
Нормативный срок службы до первого капитального ремонта | Тк | лет | |||
Категория рем-ой сложности | ; | ; | |||
Режим работы | ; | ; | лёгкий | лёгкий | |
График работы | ; | ; | прерывн. | прерывн. | |
Количество смен | Ксм | смен | |||
Продолжительность смены | Тсм | час | |||
Продолжительность технологического цикла | Тц | мин | 6,5 | ||
Таблица 11.2 — Расчёт эффективного фонда времени работы оборудования
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Календарное время | Дк | дни | |||
Выходные дни | Дв | дни | |||
Праздничные дни | Дп | дни | |||
Количество рабочих смен в сутки | Ксм | смен | |||
Продолжительность рабочей смены | Тсм | час | 8,2 | 8,2 | |
Процент потерь времени из-за простоя в ремонте | Р | % | 3,5 | 3,5 | |
Эффективный фонд рабочего времени | Fэф | дни | |||
Таблица 11.3 — Производительность мостового крана
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Грузоподъёмность | Q | т | |||
Продолжительность технологического цикла | Тц | мин | 6,5 | ||
Эффективный фонд рабочего времени | Fэф | дни | |||
Производительность мостового крана | В | тонн/год | |||
Таблица 11.4 — Первоначальные стоимостные показатели
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Цена крана | Ц | млн.тенге | 1,92 | 1,92 | |
Транспортные расходы | Зт | млн.тенге | 0,13 | 0,13 | |
Затраты на монтаж | Зм | млн.тенге | 0,128 | 0,128 | |
Складские затраты | Зскл | млн.тенге | 0,057 | 0,057 | |
Затраты на модернизацию | Змод | млн.тенге | ; | 0,95 | |
Итого | Кб | млн.тенге | 2,235 | 3,185 | |
Таблица 11.5 — Расчет годовых затрат на амортизацию
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Полная первоначальная стоимость | Кб | млн.тенге | 2,235 | 3,185 | |
Срок службы | Тсл | лет | |||
Норма амортизации | На | % | |||
Амортизационные отчисления | А | тенге | |||
Таблица 11.6 — Годовые затраты на энергию
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Суммарная мощность электродвигателей | ?Nд | кВт | 28,5 | ||
Коэффициент использования установочной мощности | Км | -; | 0,75 | 0,75 | |
Цена силовой энергии | Цс | тенге | 4,5 | 4,5 | |
Годовой календарный фонд времени работы оборудования | Тк | час | |||
Коэффициент использования календарного фонда времени при ПВ=15% | Кв | -; | 0,15 | 0,15 | |
Затраты на силовую энергию | Сэн.с. | млн.тенге | 0,18 939 | 0,30 568 | |
Осветительная площадь | S | м•м | |||
Удельная площадь освещения | Ум | Вт/мІ | |||
Цена осветительной энергии | Цс | тенге | 4,5 | 4,5 | |
Затраты на осветительную энергию | Сэн.о. | млн.тенге | 0,2 955 | 0,2 955 | |
Общие затраты на энергию | Сэн. | млн.тенге | 0,21 894 | 0,33 523 | |
Таблица 11.7 — Показатели межремонтного периода
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Нормативный срок до первого капитального ремонта | А | лет | |||
час | |||||
Коэффициент учитывающий тип производства | В1 | -; | |||
Коэффициент учитывающий Габариты крана | В2 | -; | 1,2 | 1,2 | |
Коэффициент учитывающий условия эксплуатации | В3 | -; | |||
Ремонтный цикл Трц=А•В1•В2•В3 | Трц | час | |||
Количество ремонтов: | |||||
—текущий № 1 | Т1 | ед. | |||
—текущий № 2 | Т2 | ед. | |||
—капитальный | К | ед. | |||
Итого: | -; | ед. | |||
Межремонтный период Тмр=Трц/(Т1+Т2+К) | Тмр | час | |||
Таблица 11.8 — Затраты на текущий ремонт крана
Показатели | Обоз. | Ед. изм | Базовый вариант | Модернизированный вариант | |
Количество ремонтов: | |||||
—текущий № 1 | Т1 | ед. | |||
—текущий № 2 | Т2 | ед. | |||
—капитальный | К | ед. | |||
Трудоёмкость ремонтов: | |||||
—текущего № 1 | t1 | ||||
—текущего № 2 | t2 | ||||
—капитального | tk | ||||
Трудоёмкость ремонтных работ: | Тр.р. | час/чел | 1621,5 | ||
Средняя часовая тарифная ставка | Тст. | тенге | |||
Затраты по зарплате | Фзп | тенге | |||
По тарифу | зт | тенге | |||
Дополнительная | Зд | тенге | |||
Отчисления на соц. налог | Зо | тенге | |||
Затраты на материалы | Зм | тенге | |||
Суммарные затраты на текущий ремонт | ?Зрем | тенге | |||
Таблица 11.9 — Баланс рабочего времени
Показатели | Обоз. | Ед. изм | Базовый вариант | Модернизированный вариант | |
Календарное время | Дк | дни | |||
Выходные дни | Дв | дни | |||
Праздничные дни | Дп | дни | |||
Номинальный фонд рабочего времени | Н | дни | |||
Невыходы: | -; | дни | |||
—отпуск | До | дни | |||
—болезни | Дб | дни | |||
—прочие | -; | дни | |||
Эфф фонд рабочего времени | Эф | час | |||
Продолжительность смены | Тсм | час | 8,2 | 8,2 | |
Количество раб. смен в сутки | Ксм | смен | |||
Коэффициент спис. состава | Кс.с. | -; | 1,64 | 1,64 | |
Таблица 11.10 — Расчет фонда заработной платы.
Профессия | машинист | стропальщик | ||
Разряд рабочего | ||||
Тарифная ставка, тенге за час | ||||
Система оплаты труда | повремен. | повременная | ||
Численность, человек | явочная | |||
списочная | ||||
Эффективный фонд рабочего времени, час | одного рабочего | |||
всех рабочих | ||||
Основная заработная плата, тенге | по тарифу | |||
премия (20%) | ||||
ночные | ||||
прочие (10%) | ||||
итого | ||||
Дополнительная заработная плата, тенге | отпускные | |||
дополнительные | ||||
итого | ||||
Общая сумма заработной платы, тенге | ||||
Таблица 11.11 — Смета затрат на содержание и эксплуатацию крана (в млн. тенге)
Показатели | Обоз. | Базовый вариант | Модернизированный вариант | |
Основная зарплата | тенге | |||
Дополнительные расходы на охоану труда (2%) | тенге | |||
Социальный налог | тенге | |||
Аммортизация | тенге | |||
Текущий ремонт | тенге | |||
Вспомогательные материалы | тенге | |||
Электроэнергия | тенге | |||
Итого | тенге | |||
Таблица 11.12 — Экономическая эффективность проведённой модернизации
Показатели | Обоз. | Ед. изм. | Базовый вариант | Модернизированный вариант | |
Годовая производительность крана | В | тонн/год | |||
Капитальные вложения | Кб | млн.тенге | 2,235 | 3,185 | |
Затраты на обслуживание и ремонт | С | тенге | |||
Затраты на одну тонну груза | Сгр | тенге | 11,94 | 5,91 | |
Экономический эффект | Э | млн.тенге | Ї | 1,172 636 | |
Срок окупаемости капитальных и дополнительных вложений | Ток | лет | 1,002 | 1,002 | |
Заключение
Произведённая модернизация окупит себя в течение года. Стоит обратить внимание на то, что, данный срок окупаемости справедлив для количества рабочих циклов соответствующих лёгкому режиму работы. Модернизированная конструкция крана позволяет работать ему в более интенсивном режиме. Также необходимо отметить, что время технологического цикла немодернизированного крана может увеличиться из-за недостаточной грузоподъёмности (10тонн), вследствие чего, новые вакуум-насосные станции, имеющие обычную массу 12.5 тонн, необходимо разбирать для транспортировки к месту монтажа в разобранном виде, в противном случае (без разборки), кран будет работать с заметным перегрузом, что ведёт к снижению срока службы, как металлоконструкций, так и механизмов. Из всего выше указанного следует, что срок окупаемости в 1 год — верхняя граница, а реальное время может быть заметно ниже, здесь многое зависит от условий и культуры эксплуатации.
Разработанная технология ремонта и технического обслуживания крана позволит качественно проводить его эксплуатацию и снизить процент простоя из-за неисправностей механизмов и агрегатов.
1 Казак С. А. «Курсовое проектирование грузоподъёмных машин», Москва: «Высшая школа» 1989 г.
2 «Госгортехнадзор. Правила устройства и безопасной эксплуатации кранов», РК 1989 г.
3 Кобзев А. Л., Шнейдер В. Г. «Расчёт механизмов грузоподъёмных машин», Саратов 1987 г.
4 Коваль П. В. «Гидропривод горных машин». Москва «Недра», 1967 г.
5 Руденко Н. Ф. и др. «Курсовое проектирование грузоподъёмных машин». Москва: «Машиностроение».
6 «Пружины винтовые цилиндрические сжатия и расширения из стали круглого сечения ГОСТ 13 764–86 — ГОСТ 13 776–86 (СТ СЭВ 5616−86)». Государственный комитет СССР по стандартам. Москва 1987 г.
7 Анурьев В. И. «Справочник конструктора-машиностроителя». Москва: «Машиностроение». 1979 г.
8 Васильченко В. А. «Гидравлическое оборудование мобильных машин. Справочник». Москва: «Машиностроение». 1983 г.
9 Кабаков М. Г. и др. «Атлас конструкций гидромашин и гидропередач». Москва: «Машиностроение». 1990 г.
10 Чернавский С. А. «Проектирование механических передач». Москва: «Машиностроение». 1984 г.
11 Александров М. П.; Решетников А. Н. «ПТМ. Атлас конструкций». Москва: «Машиностроение». 1982 г.
12 Двоугий В. В. «Приводы машин. Справочник». Ленинград; «Машиностроение». 1981 г.
13 Свешников В. К., Усов А. А. «Станочные гидроприводы: справочник». Москва: «Машиностроение». 1982 г.
14 Гохберг М. Н. «Справочник по кранам». Москва: «Машиностроение». 1988 г.
15 Парницкий А. Б. и др. «Мостовые краны общего назначения», Москва: «Машиностроение». 1971 г.
16 Фесик С. П. «Справочник по сопротивлению материалов». Киев: «Будивельник», 1982 г.
17 «Металлоизделия промышленного назначения: электроды специального назначения для сварки и наплавки. Продукция чёрной металлургии. Отрослевой каталог». Москва: ЦНИИ информации и технико-экономических исследований чёрной металлургии". 1989 г.
18 Подгорный Ю. П. и др. «Гидропривод тяжёлых грузоподъёмных машин и самоходных агрегатов». Москва: «Машиностроение». 1989 г.
19 Ушаков Н. С. «Мостовые электрические краны». Ленинград. «Машиностроение». 1980 г.
20 Мягков В. Д. «Допуски и посадки» в 2 томах. Ленинград. «Машиностроение». 1982 г.
21 Дубовский К. Н. «Электрооборудование мостовых кранов» Москва: «Энергия». 1980 г.
22 Богословский А. П. и др. «Электрооборудование кранов». Москва: «Машиностроение». 1983 г.
23 «Надёжность и безопасность грузоподъёмных машин» под ред. Шишкова Н. А. Москва: «Недра». 1990 г.
24 Касилова А. Г., Сухов М. Ф. «Технология машиностроения подъёмно-транспортных машин». Москва: «Машиностроение». 1982 г.
25 Александров М. П. и др. «Грузоподъёмные машины». Москва: «Машиностроение». 1986 г.