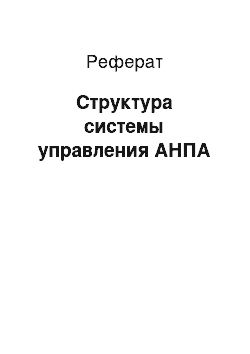
При разработке системы управления необходимо выделить ее основные блоки. Для объединения блоков в цепочку разрабатывается структурная схема (см. рис. 7).
В структурной схеме системы управления АНПА, представленной на рисунке 7, автопилот формирует управляющие воздействия на основе координат точки позиционирования или траектории движения. Блок оценивания осуществляет оценивание внешних не измеряемых сил и моментов. Блок обработки навигационных данных компенсирует навигационные данные от бортовой навигационной системы АНПА, локальной навигационной системы и глобальной системы навигации. Миссия ведущего АНПА задается оператором, а миссия ведомых АНПА корректируется в зависимости от поведения, ведущего АНПА.
Рис. 7 — Структура системы управления АНПА
Заключение
В данной работе представлен алгоритм адаптивного управления АНПА, построенного на базе позиционно-траекторного метода с контуром слежения за выходами эталонной модели, и контуром оценивания внешних и параметрических воздействий на эталонную модель. АНПА функционирует в группе, состоящей из 5-ти подводный роботов. Движение ведущего АНПА используется как движение эталонного подвижного объекта, а параметры его состояния как параметры эталонной модели. Ведомые АНПА осуществляют слежение за эталонным движением. Предложенный алгоритм управления АНПА позволяет обеспечивать высокую степень устойчивости системы не только по средствам регулирования нижнего уровня управления, но, так же, смягчить требования к самой эталонной модели, что, в свою очередь, позволит повысить эффективность прикладного использования алгоритма прямого адаптивного управления с эталонной моделью.
Приведенное в статье моделирование показывает работоспособность предложенного подхода. Отклонение параметров объекта управления от значений эталонной модели, при условии воздействия внешнего возмущения на объект, остается в приделах 0,1 — 0,2%.
При этом уровень отклонения оцениваемых значений неизмеряемого воздействия от реальных значений в приделах 2%. Отклонение зависит от параметров быстродействия наблюдателя a1, и может быть уменьшено при наличии возможности повышения этого коэффициента.
Благодарности
Работа выполнена в Южном федеральном университете в рамках гранта Президента Российской федерации для государственной поддержки молодых российских ученых МК-3089.2017.8.