Синхронный двигатель.
Электроэнергетические системы и сети.
Электромеханические переходные процессы
При набросс механической мощности и при резком снижении напряжения новый установившийся режим синхронного электродвигателя на этих рисунках изображается точкой Ь. Динамические характеристики Рся (0, 8(/), л'(/) в этих случаях весьма сходны (рис. 4.6, б, 4.7, б). Углубленный анализ этих случаев необходим при определении условий сохранения динамической устойчивости синхронных электродвигателей… Читать ещё >
Синхронный двигатель. Электроэнергетические системы и сети. Электромеханические переходные процессы (реферат, курсовая, диплом, контрольная)
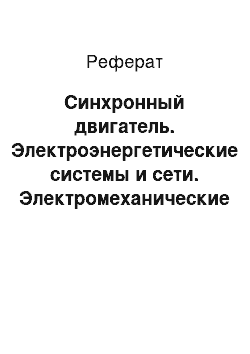
Такие динамические характеристики синхронного двигателя, как PCJir>(t), S (t), s (t), могут быть рассчитаны по уравнению движения ротора путем его численного решения, например методом последовательных интервалов. Большие возмущения типа резких изменений механического момента или резких изменений модуля напряжения приводят к однотипным процессам. При этом, поскольку у синхронных двигателей векторы ЭДС отстают от векторов напряжений в узлах подключения, основная часть процессов проходит в области отрицательных углов (рис. 4.5). Аналогичные процессы у синхронных двигателей и синхронных генераторов проходят, образно говоря, в противоположных направлениях, что позволяет использовать угловые характеристики и другие сведения о переходных процессах генераторов для анализа работы синхронных двигателей (рис. 4.6,4.7).

Рис. 4.5. Электрическая схема (а), схема замещения (б) и векторная диаграмма напряжений (в) синхронного двигателя.
При набросс механической мощности и при резком снижении напряжения новый установившийся режим синхронного электродвигателя на этих рисунках изображается точкой Ь. Динамические характеристики Рся(0, 8(/), л'(/) в этих случаях весьма сходны (рис. 4.6, б, 4.7, б).
Соответственно, сходными являются и условия сохранения динамической устойчивости синхронного двигателя при этих возмущениях.
При анализе динамической устойчивости синхронного двигателя удобно использовать, как и в случае с синхронным генератором, правило площадей и критерий динамической устойчивсги. Суть правила площадей, а именно равенство суммарных площадок торможения и ускорения (FycK = FTOpM), при этом сохраняется, а критерий динамической устойчивости видоизменяется, поскольку на начальной стадии переходного режима при набросе механического момента и при снижении напряжения ротор двигателя затормаживается. Поэтому для возврата в исходное состояние на следующей стадии требуется иметь достаточную площадь возможного ускорения FBomycK. Соответственно, коэффициент запаса динамической устойчивости синхронного двигателя Кау и критерий его динамической устойчивости определяются выражениями:

Представляют интерес предельные случаи, когда K:iy = 1, то есть когда 

Рис. 4.6. Характеристики синхронного двигателя при скачкообразном увеличении механического момента: а — угловая, б — динамические.

Рис. 4.7. Характеристики синхронного двигателя при скачкообразном снижении напряжения: а — угловые, б — динамические.
Углубленный анализ этих случаев необходим при определении условий сохранения динамической устойчивости синхронных электродвигателей.