Вычислительный эксперимент.
Разработка и исследование искусственной нейронной сети для управления динамическим объектом с переменными параметрами
Пусть MN — заданная прямолинейная траектория, по которой должен двигаться снаряд. В этом случае заданное значение координаты центра тяжести снаряда по оси есть. Рис. 26 Схема угловых и линейных координат, характеризующих положение снаряда относительно прямолинейной траектории в боковом движении. Пакет для работы с нейронными сетями Neural Network Toolbox представляет собой полноценную среду… Читать ещё >
Вычислительный эксперимент. Разработка и исследование искусственной нейронной сети для управления динамическим объектом с переменными параметрами (реферат, курсовая, диплом, контрольная)
Итак, в ходе решения проблемы предстоит разработать искусственную нейронную сеть, для адаптивной настройки параметров регулятора, управляющего объектом с переменными параметрами.
Математическая модель объекта управления
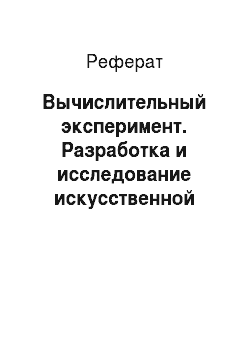
В качестве примера рассмотрим модель динамического объекта, описывающую крестокрылый снаряд, который требуется стабилизировать относительно центра тяжести по заданной траектории.

Рис. 26 Схема угловых и линейных координат, характеризующих положение снаряда относительно прямолинейной траектории в боковом движении
Пусть MN — заданная прямолинейная траектория, по которой должен двигаться снаряд. В этом случае заданное значение координаты центра тяжести снаряда по оси есть .
Рассмотрим систему управления боковым отклонением центра тяжести крестокрылого снаряда, учитывая переходные процессы в угловом движении снаряда. Система уравнений имеет вид:

Изначально структурная схема данной системы выглядит так:

Рис. 27 Схема динамического объекта с регулятором
Выбор параметров автопилота (передаточных чисел) будет состоять в задаче синтеза регулятора.
В качестве объекта управления возьмем снаряд с параметрами, заданными в таб. 1.
Таблица 1. Параметры снаряда.
1/с. | 1/с. | 1/с2 | 1/с2 | 1/с2 |
0,34. | 0,645. | 13,6. | 5,6. | 1,9. |

Параметры скорости () и аэродинамического коэффициента () будут изменяться в пределах:

Все расчеты будут производиться в среде Matlab 7. 11. 0 (R2010b).
Моделирование будет производиться в среде Simulink 7. 6.
При решении задачи будут использованы пакеты Matlab Neural Network Toolbox и Control System Toolbox.
Пакет для работы с нейронными сетями Neural Network Toolbox представляет собой полноценную среду MATLAB для решения прикладных задач.
Требуется настроить ПИД-регулятор для системы, исходя из критериев:
- — время переходного процесса;
- — перерегулирование: ;
ПИД-регулятор будет использован в виде, представленном на рис. 27:

Рис. 28 Схема ПИД-регулятора