Переход от расчётного электропривода постоянного тока к электроприводу переменного тока
Так как из-за нехватки времени не было найдено двигателя переменного тока, то введем параметры таким образом, как это показано на рис. 7.2. В результате курсовой работы было разработано современное регулирующее устройство для электропривода токарного станка модели 500VT. Линейный вариант ЭПОСП удовлетворяет всем требованиям, кроме требования по статической ошибке слежения. По той же причине… Читать ещё >
Переход от расчётного электропривода постоянного тока к электроприводу переменного тока (реферат, курсовая, диплом, контрольная)
Переход к электроприводу переменного тока осуществим с помощью Demo-версии привода, взятого из SIMULINK. Используется файл psbacdrive.mdl. Структурная схема привода приведена на рис 7.1.

Рис 7.1. Модель из файла psbacdrive1. mdl
Так как из-за нехватки времени не было найдено двигателя переменного тока, то введем параметры таким образом, как это показано на рис. 7.2.

Рис 7.2. Вводимые параметры двигателя

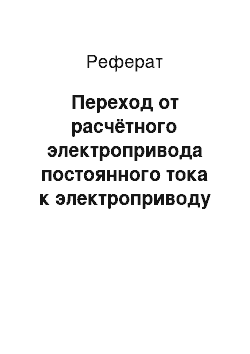
Рис 7.3. Результаты моделирования привода переменного тока
Анализ нижнего графика на рис. 7.3, который представляет собой скорость ротора:
время переходного процесса: 0.0045с;
перерегулирование: 15%.
ЗАКЛЮЧЕНИЕ
1. В результате курсовой работы было разработано современное регулирующее устройство для электропривода токарного станка модели 500VT.
Первый вариант привода представляет собой РЭП, построенный по системе подчиненного регулирования, с ДУМС, с наблюдателем и взятыми с него обратными связями по моменту сопротивления и по ускорению.
Второй вариант привода представляет собой цифровой ЭПОСП, построенный по системе подчиненного регулирования, с ДУМС, с наблюдателем и взятыми с него обратными связями по моменту сопротивления и по ускорению.
- 2. Результаты работы.
- 2.1. Результаты для РЭП:
- · линейный вариант (модель из пункта 4.4, файл Nabl2. mdl):
время регулирования: 0.4 с;
перерегулирование: 8.65%;
динамический провал: до 90%;
время реакции на скачкообразное изменение нагрузки: 0.4 c;
диапазон регулирования: 10 000 (от 0.0104 рад/с до 104 рад/с);
момент сопротивления: 0.003 Н•м;
· нелинейный вариант (модель из пункта 6.2, файл Nrep. mdl):
при отработке максимальной скорости:
время регулирования: 0.15 с;
перерегулирование: 16%;
при отработке минимальной скорости:
переходный процесс имеет колебания с амплитудой около 0.5 рад/с;
диапазон регулирования: не определен;
момент сопротивления: 0.009 Н•м.
- 2.2. Результаты для ЭПОСП:
- · линейный вариант (модель из пункта 4.5, файл Eposp. mdl):
время регулирования: 0.2 с;
перерегулирование отсутствует;
статическая ошибка слежения: 0.003 рад;
· нелинейный вариант (модель из пункта 5.3.2, файл n53_nel_eposp.mdl):
при отработке ступеньки величиной 1 рад:
переходный процесс имеет колебания с амплитудой около 35 рад;
при отработке ступеньки величиной 0.1 рад:
время регулирования: 0.25 с;
перерегулирование: 7%.
- 3. Качественные выводы.
- 3.1. Требования для РЭП:
время регулирования: 1 с;
перерегулирование: 20%;
диапазон регулирования: 10 000;
динамический провал: 90%;
время реакции на скачкообразное: 0.6 c;
момент сопротивления: 0.1•Мн.
Линейный вариант РЭП удовлетворяет всем требованиям кроме отработки момента сопротивления. С требуемым динамическим провалом на минимальной скорости вращения привод может отрабатывать только момент сопротивления 0.41•Мн.
Нелинейный вариант РЭП удовлетворяет лишь требованию по диапазону регулирования.
3.2. Требования для ЭПОСП:
статическая ошибка слежения: 0.005 рад;
показатель колебательности: 1.25 (перерегулирование: 15%);
время регулирования: 0.6 с.
Линейный вариант ЭПОСП удовлетворяет всем требованиям, кроме требования по статической ошибке слежения.
Нелинейный вариант ЭПОСП не удовлетворяет всем требованиям.
- 4. Недоработки.
- 4.1. Несоблюдение требований разных вариантов привода могло возникнуть из-за неправильной разработки современного регулирующего устройства для электропривода токарного станка модели 500VT.
- 4.2. Из-за нехватки времени не был найден двигатель для электропривода переменного тока.
- 4.3. По той же причине не был произведен учет интервальной неопределенности параметров привода.