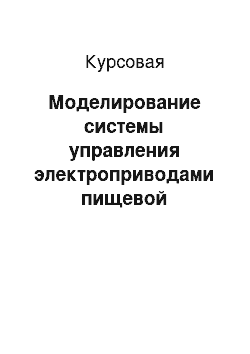
Модель, представленная на рисунке 3.1, была разработана на основы схемы ПЧ-АД, представленной в [11]. Рис.
3.1. Модель в MatlabSimulinkПредставленная модель включает в себя: — трёхфазный источник питания (Three-PhaseSource);- мостовую схему выпрямления (UniversalBridge);- сглаживающийфильтр (ParallelRCBranch);- инвертор (IGBT-транзистор);- асинхронный двигатель (InductionMotor).Данная модель ПЧ имеет векторное управление, что и было необходимо для управления сепаратором и именно такое управление реализовано в выбранном ПЧ, «Altivar 71» серии ATV 11. Рассмотренная схема имеет блок векторного управления (VectorControl), схема которого представлена на рисунке 3.
2. В качестве контроллера (SpeedController) используется ПИ-регулятор. Рис.
3.2. Блок Vectorcontrol. Кроме того, подсистема «VectorControl» имеет блок преобразования из системы координат dqв систему ABC (рисунок 3.3). Рис. 3.
3. Блок преобразования dq — ABCИмеется и обратная система преобразования ABC-dq (рис. 3.4). Рис. 3.
4. Блок преобразования ABC — dq3.2 Показатели качества переходных процессов При помощи имитационной модели произведем моделирование переходных процессов, которые соответствуют работе электропривода при сепарировании молока. При моделировании будем задавать номинальную скорость 148,5 рад/с, а момент при холостом ходу, равный 0,25 Нм. В результате, ток статора будет иметь форму, представленную на рисунке 3.
5. Рис.
3.5. Ток статора.
На рисунке 3.6 представлена форма напряжения на выходе инвертора. Рис.
3.6. Форма напряжения на выходе инвертора.
График изменения момента при заданных характеристиках представлен на рисунке 3.
7. Рис.
3.7. Переходный процесс момента.
Переходный процесс скорости представлен на рисунке 3.
8. Рис.
3.8. Переходный процесс скорости.
Качественные характеристики переходного процесса скорости представлены ниже:
время регулирования, перерегулирование время достижения максимума время нарастания, число колебаний n=1.Рассмотрим процесс резкого возрастания момента сопротивления, образованного в ходе перегрузки. В подобном случае график изменения скорости имеет такой же вид, как и на рисунке 3.
8. Однако наблюдается небольшая просадка скорости в период времени, когда подаётся внешний момент сопротивления (рисунок 3.9). Очевидно, что смоделированная система имеет правильные показатели регуляторов и отрабатывает внешнее возмущение, возвращаясь в установившееся значение. Рис.
3.9. Переходный процесс скорости при подаче момента сопротивления Таким образом, показатели качества свидетельствует о правильно рассчитанных параметрах электропривода и преобразователя частоты, а так же подтверждает необходимость применения векторного управления в системе электропривода с объектом в виде сепаратора.
Заключение
.
В данном проекте проведен расчет электропривода сепаратора молочных продуктов. В первой главе представлена классификация сепараторов. Приведена схема технологической установки первичной обработки молока. Показана необходимость использования сепаратора в данной схеме. Даны исходные данные сепаратора, который будет использован в качестве объекта в системе электропривода. Приведена его нагрузочная диаграмма, согласно которой сепаратор имеет два временных отрезка: время работы и время отдыха. Во второй главе обоснованы требования к электрическому приводу, среди которых выделим необходимость плавного пуска.
Данную особенность можно реализовать с помощью современных систем ПЧ-АД. Необходимость векторного управления позволит добиться более точного позиционирования, которое также является одним из требования электропривода. В ходе проведенных расчетов был выбран электродвигатель 4А80А4У3 и преобразователь частоты серии «Altivar 71» серии ATV 11 от фирмы ShneiderElectric. В третьей главе была составлена математическая модель предлагаемой системы ПЧ-АД.
По ней был произведен расчет переходных процессов. В результате моделирования определили, что величина перерегулирования скорости во время пуска и изменения нагрузки не превышает 1,3%. Таким образом, электропривод можно эксплуатировать, т.к. частота вращения отрабатывается полностью и за короткий промежуток времени.
Список использованных источников
.
http://rosseparator.ru/inform019.html.
http://fb.ru/article/231 217/separatoryi-dlya-moloka-obzor-vidyi-osobennosti-ispolzovaniya-otzyivyi Бычков В. П. Электропривод и автоматизация металлургического производства [текст]. М. Высш. школа, Изд. 2е.
— 1977, — 391с. Бурьянов В. Ф., Рокотян Е. С., Гуревич А. Е. Расчет мощности двигателей главных приводов прокатных станов [текст]. М.: Металлургиздат, 1977. — 360 с. Ключев В. И. Теория электропривода [текст]. — М.: Энергоатамиздат, Изд.3-е. — 2001. -.
697с.Розанов Ю. К. Основы силовой электроники. — Москва, издательство Энергоатомиздат, 1992. — 296 с. Бесекерский В. А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов.
— Санкт-Петербург: Профессия, 2003. — 752 с. Горев А. А. Переходные процессы асинхронной машины. -.
М. -Л.: Госэнергоиздат, 1950.
Вольдек А. И. Электрические машины. — 3-е изд., перераб. — Л.: Энергия, 1978.
10.
http://частотники.
рф/files/ATV71_katalog.pdf11. С.Г. Герман-Галкин Силовая электроника. Лабораторные работы на ПК.; СПб.: Учитель и ученик, КОРОНА принт, 2002. — 304 с.