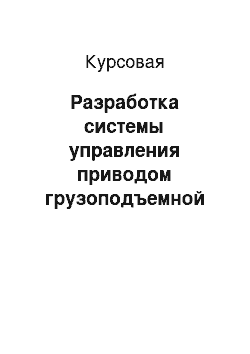
При изменении напряжения на якорной цепи двигателя его характеристики перемещаются параллельно естественной (т.е. жесткость не меняется). Скорость идеального холостого хода и номинальную скорость при напряжении отличном от номинального, можно найти по соотношению. Проведя прямую через параллельно естественной характеристике, получаем искусственную механическую характеристику при сниженном напряжении U=0.5UH. Характеристика при минимальном напряжении должна быть такой, чтобы при изменении момента на валу двигателя в необходимых пределах последний не останавливался. Обычно полагают, что эта характеристика должна пересечь прямую через I=2IH. Проведя прямую через I=2IH параллельно естественной характеристике, находим скорости, (рисунок 6.2).Рисунок 6.2 — Электромеханические характеристики при питании от сети.
Минимальная скорость будет равна (определим графически из рис.
6.2): Определяем минимальное напряжение:.Диапазон регулирования скорости (изменением напряжения):.Диапазон регулирования скорости (изменением магнитного потока). (определим графически по рис.
6.2):.Общий диапазон регулирования:.Определяем жесткость механической характеристики:.Статизм характеристики определяется следующим образом:.Построение электромеханических характеристик двигателя при питании от преобразователя в разомкнутой системе и при допущениях непрерывности тока вплоть до I=0 можно осуществить по формуле:
Характеристику необходимо строить при углах управления (обеспечивает получение номинальной скорости при номинальном напряжении нагрузки); и (обеспечивает минимальную скорость при номинальной нагрузке).Значения и находим по формулам:
Результаты расчетов приведем в таблицу 6.
1.Таблица 6.1 — Результаты расчетов32.
7649.
1484.14I0Iн2· Iн0Iн2·Iн0Iн2·Iнω89.
2583.
7678.
2769.
4263.
9358.
4411.
025.
530.04По расчетным данным строим электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе (рисунок 6.3).Рисунок 6.3 — Электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе.
На основании результатов можно сделать вывод, что при питании от тиристорного преобразователя жесткость электромеханической характеристики значительно уменьшается, а статическая погрешность возрастает. Расчетная функциональная схема РЭП составляется в соответствии с рисунком 6.
4.Рисунок 6.4 -Функциональная схема 2-хконтурной замкнутой САУ РЭПНа рисунке приняты следующие обозначения: ЗС — задатчик скорости; ЗИ — задатчик интенсивности; - напряжение задания; - напряжение управления во внешнем контуре, определяемое разностью между и сигналом обратной связи по скорости; НЗ2 — нелинейное звено в регуляторе скорости — зона насыщения; - напряжение сравнения в зоне насыщения; РС — регулятор скорости; - коэффициент усиления регулятора скорости; - выходное напряжение регулятора скорости; - напряжение управления во внутреннем контуре, определяемое разностью между и разностным значением сигнала обратной связи по току и опорным напряжением в НЗ1; РТ — регулятор тока; - выходное напряжение регулятора тока; ТП — тиристорный преобразователь; - напряжение на выходе тиристорного преобразователя; Д1 — статорная часть электродвигателя; - момент сопротивления; - ток двигателя; Д2 — якорная часть двигателя; ДТ — датчик тока; НЗ1 — нелинейное звено в контуре тока — зона нечувствительности; - угловая скорость; - напряжение сравнения в контуре тока; ТГ — тахогенератор — реализует обратную связь по скорости; - коэффициент передачи по скорости; ПУ — промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения.
Заключение
.
В результате проделанной работы, в соответствии с поставленной задачей, была спроектирована система автоматического управления регулируемым электроприводом. В ходе её исследования рассчитана мощность двигателя, выбран двигатель постоянного тока, рассчитаны его параметры и построены характеристики.
Литература
.
Зимин Е. Н. Автоматическое управление ЭП / Зимин Е. Н., Яковлев В. И. — М: Высш.
шк., 1979. — 317 с. Анхимюк В. Л. Проектирование САУ ЭП / Анхимюк В. Л., Опейко О. Ф. -М.:Высш.
шк., 1986.-442с.Коцегуб П. Х. Синтез вентильных приводов постоянного тока. — Донецк: ДПИ, 1983. — 180 с. Башарин А. В. Примеры расчетов автоматизированного электропривода / Башарин А. В., Голубев Ф. Н., Келлерман В. Г. — Л.: Энергия, 1972. ;
440 с. Шапарев Н. К. Автоматизация типовых технологических процессов металлообработки. — Киев; Одесса: Вища шк., 1984. — 312 с. Михайлов О. П. Динамика электромеханического привода металлорежущих станков. ;
М.: Машиностроение, 1989. — 230 с. Лебедев А. М. Следящие электроприводы станков с ЧПУ / Лебедев А. М., Орлова Р. Т., Пальцев А. В. — М.: Энергоатомиздат, 1988. — 185 с.